
第十二章 1.ABB机器人码垛仿真工作站之smart组件创建动态输送链
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
需求分析
- 输送带开启后,一直从右向左传输箱子
- 当箱子碰到左边的挡板传感器,输送带停止
- 当左边挡板的箱子被取走,输送带又开始从右往左传输箱子
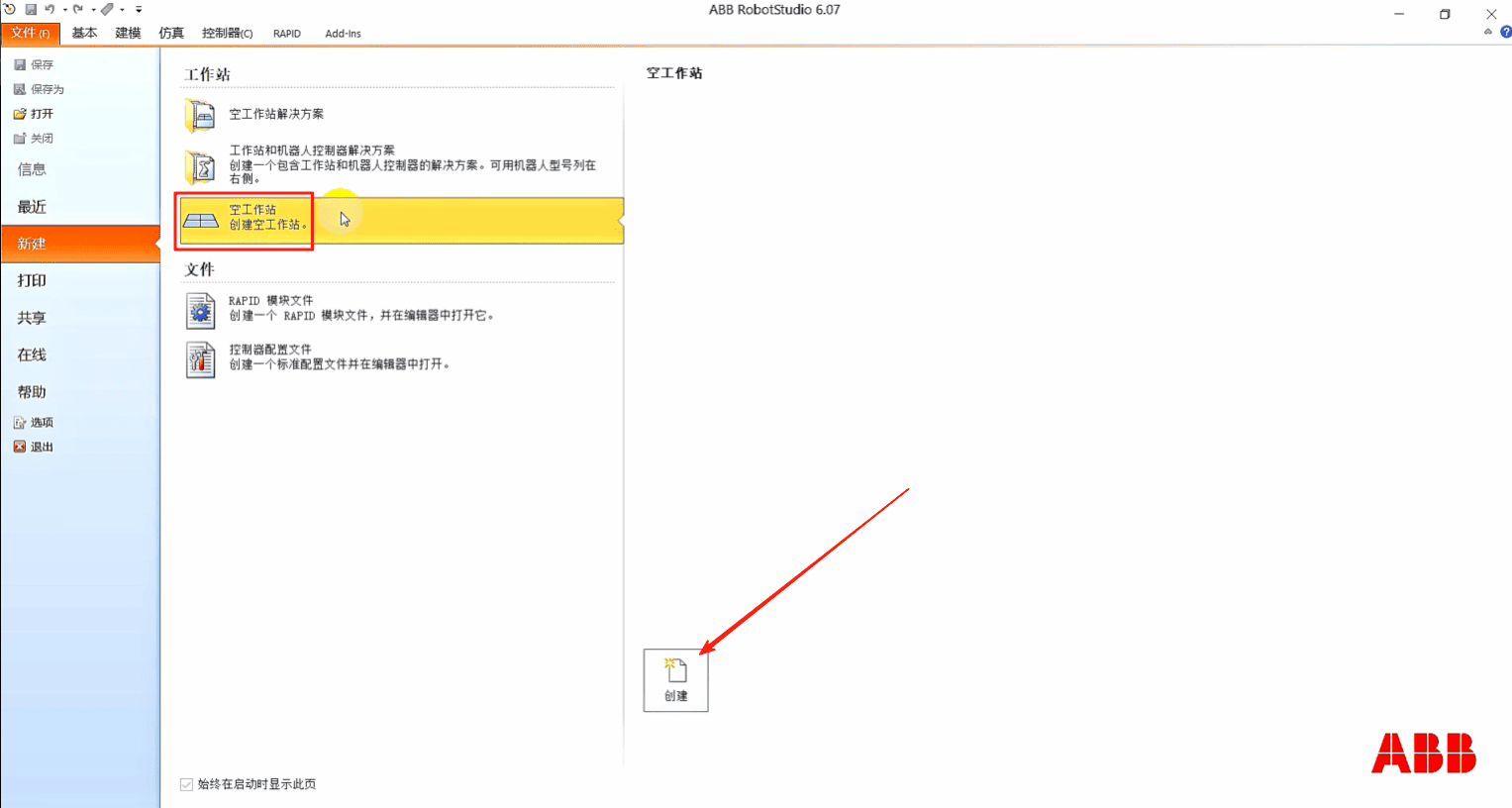
1. 创建工作站
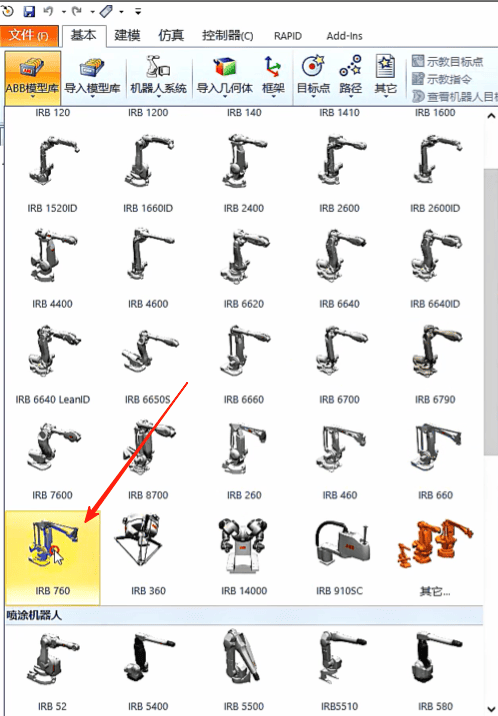
2. 导入机器人 IRB760
点击[确定]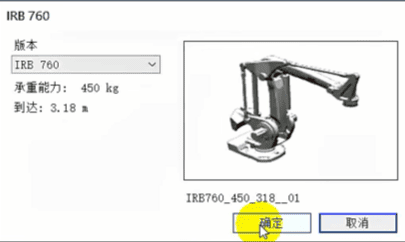
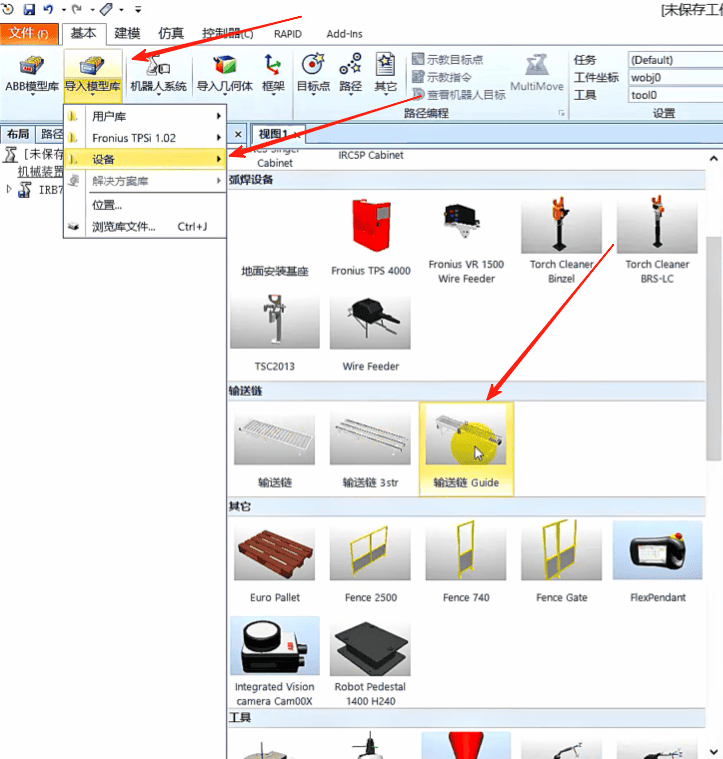
3. 导入输送带
移动输送带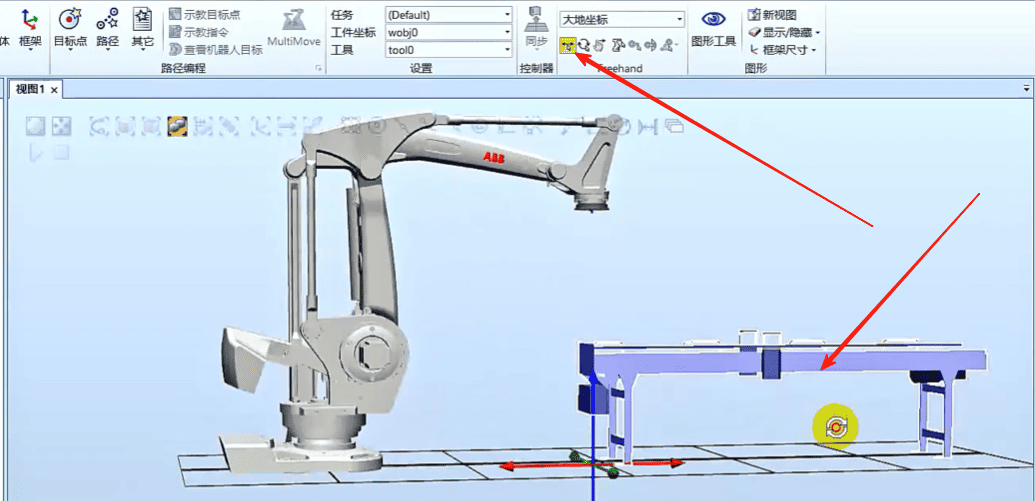
重命名输送带为 SC_Infeeder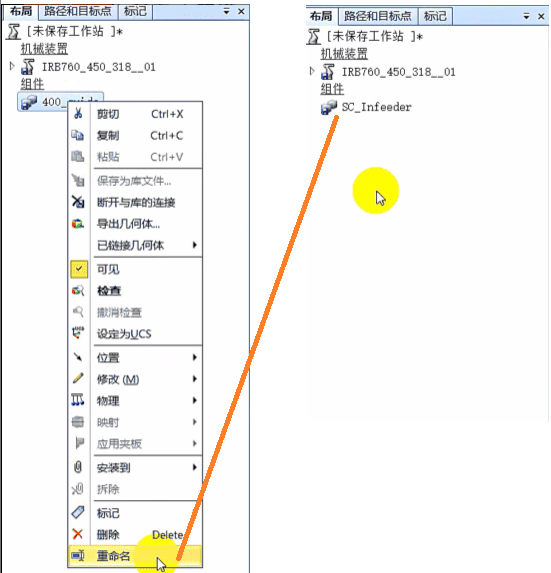
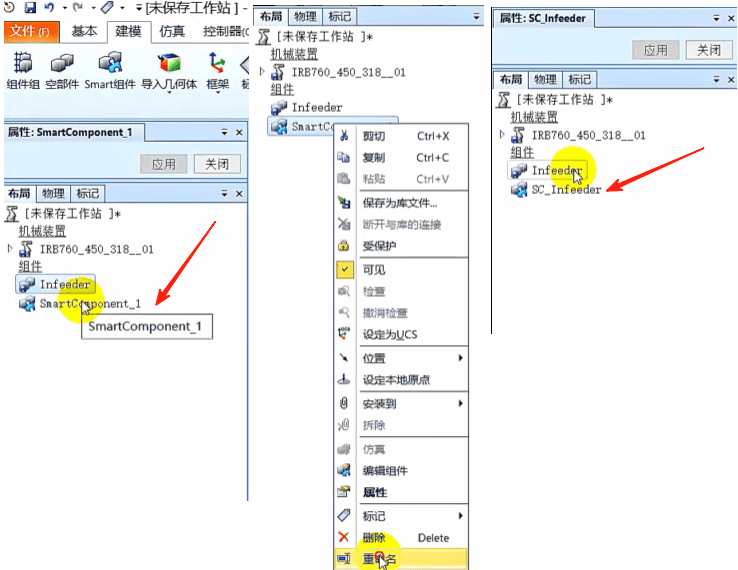
4.点击仿真 重命名Smart组件为SC_Infeeder
5.创建矩形体做箱子 点击创建
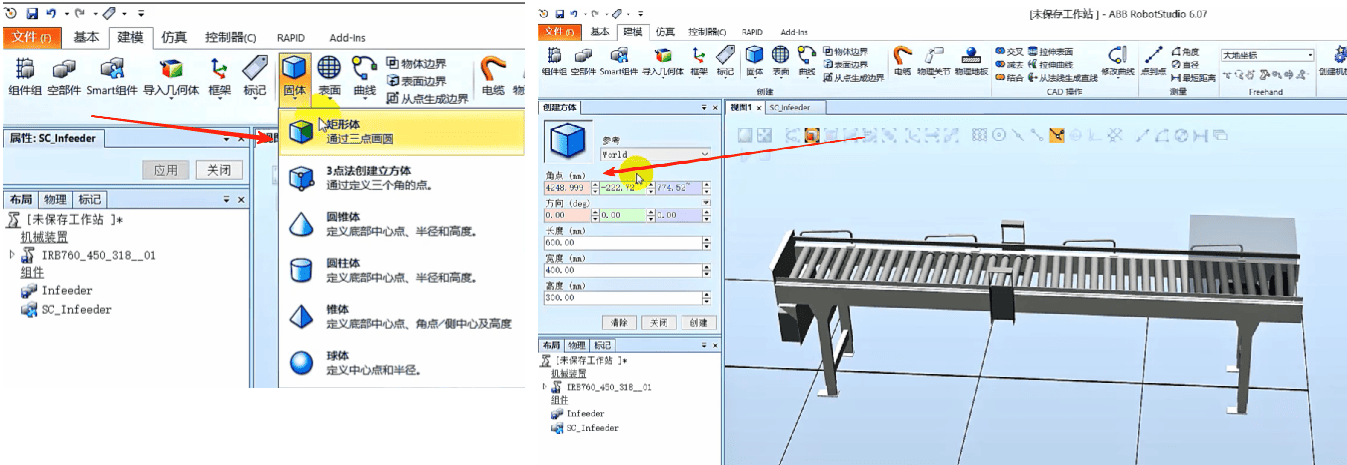
这样部件1就创建好了,重命名为箱子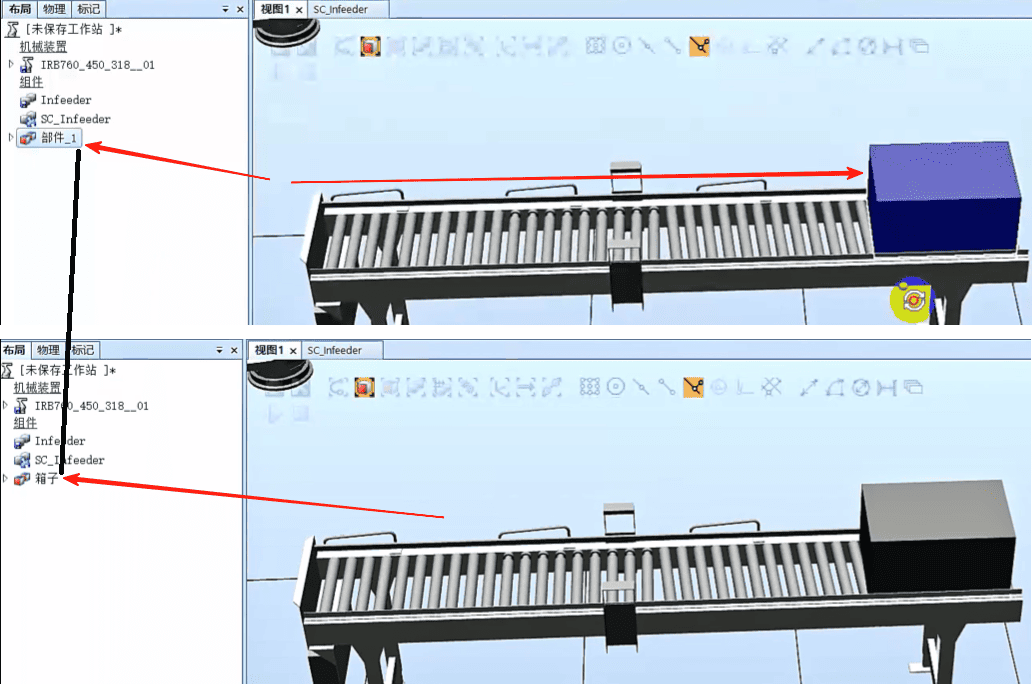
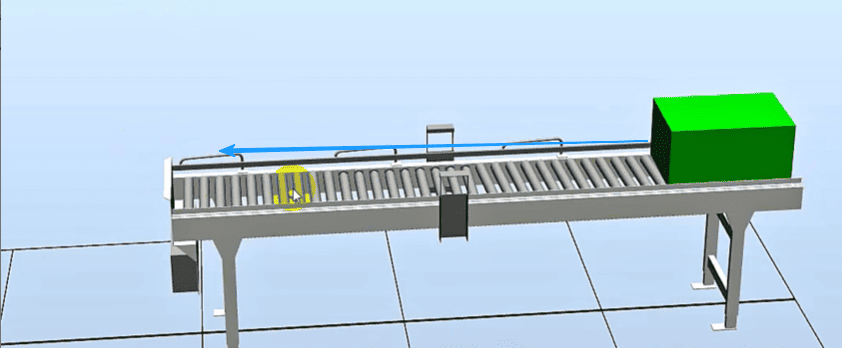
更改箱子颜色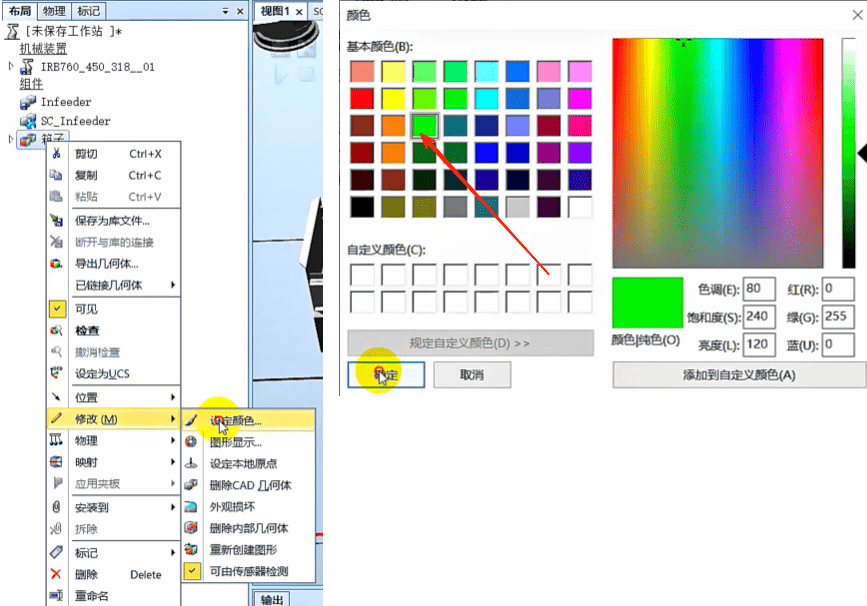
6. 希望现在从右往左走,每抓走一个过来一个
将箱子拖到Smart组件SC_Infeeder里面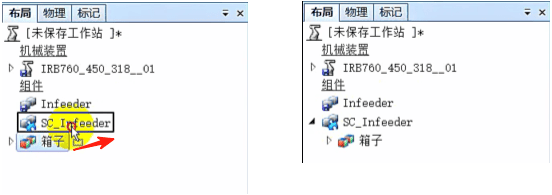
右击Smari组件SC_Infeeder里面,选择[编辑组件]
- 需要一直拷贝箱子
点击[添加组件],选择[动作],选择[Source]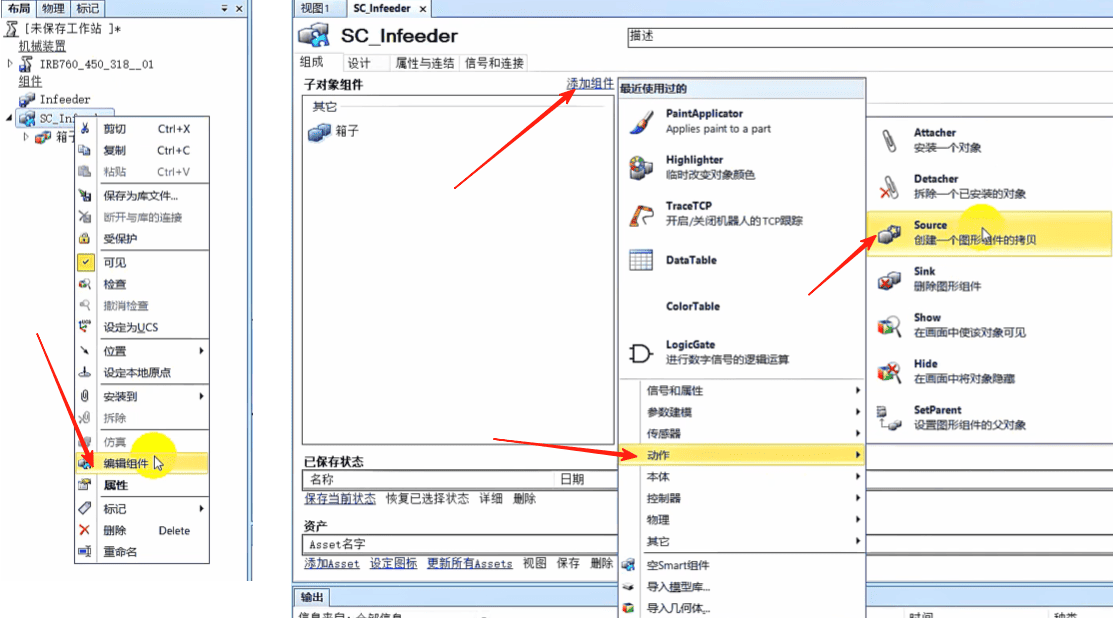
Source选择SC_Infeeder/箱子,点击[应用]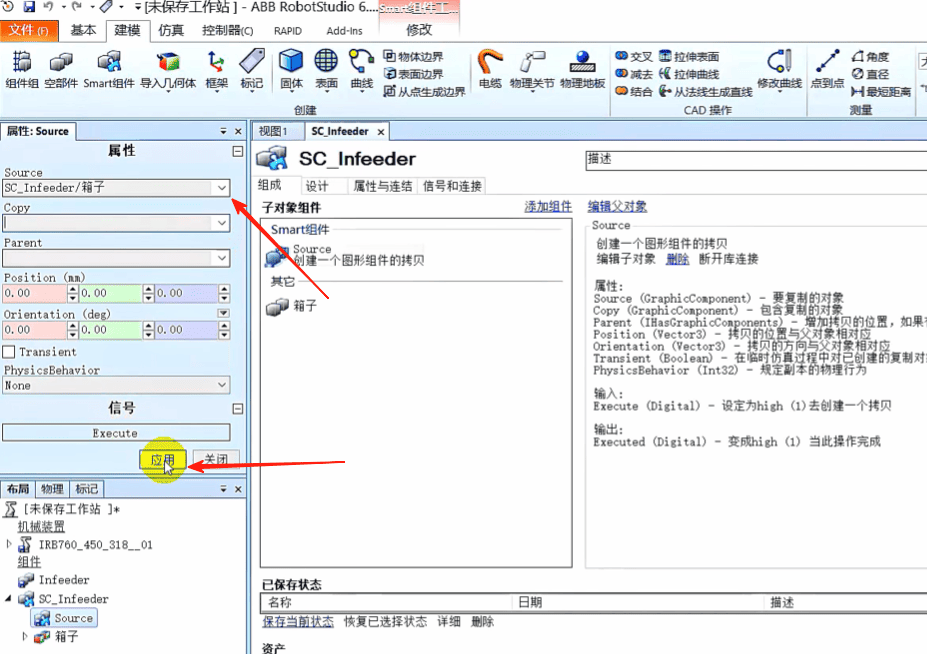
- 箱子需要排队过去,所以要创建队列
点击[添加组件],[其他],[Queue]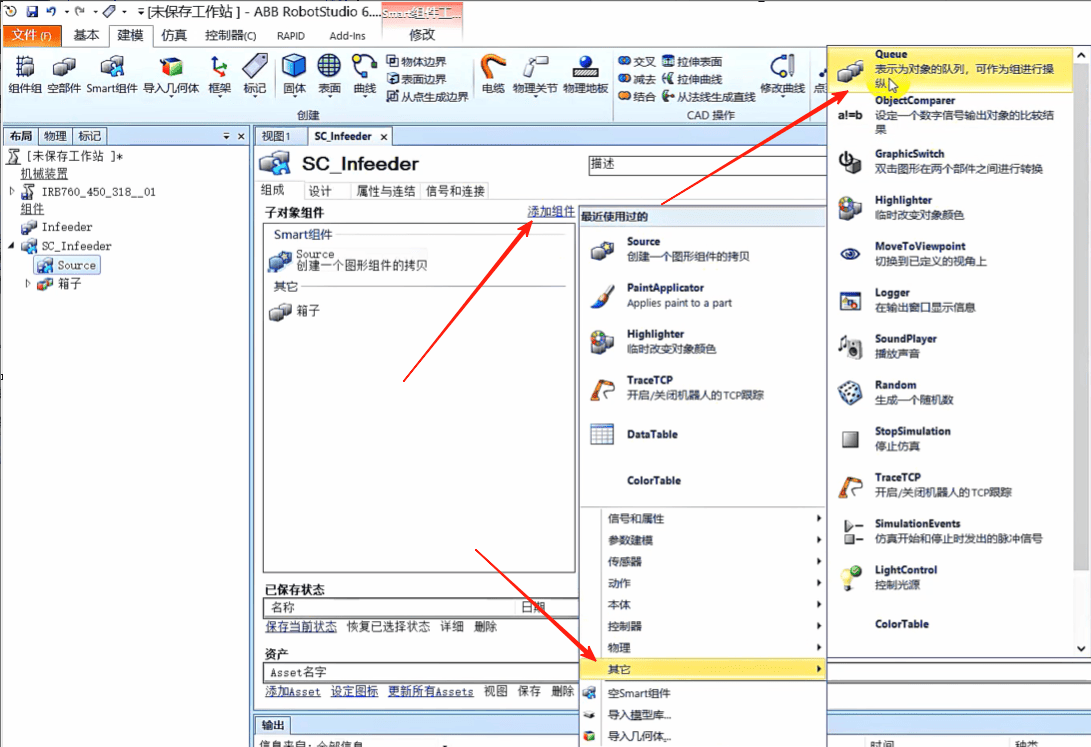
- 箱子需要从右边运动到左边,所以要添加一个运动 点击[添加组件],[本体][LinerMover]
- 移动的对象就是队列里面的对象 点击应用
- 添加一个传感器,检测物体碰到面传感器时停止 点击[添加组件],[传感器],[PlaneSensor] 这个面是Y和Z面上,所以X方向不需要有值,让他一直执行
- 传感器检测不能检测输送带 右击输送带Infeeder,去掉 可由传感器检测 点击[属性与连结],点击[添加链接] 复制品是要加入队列的一个对象
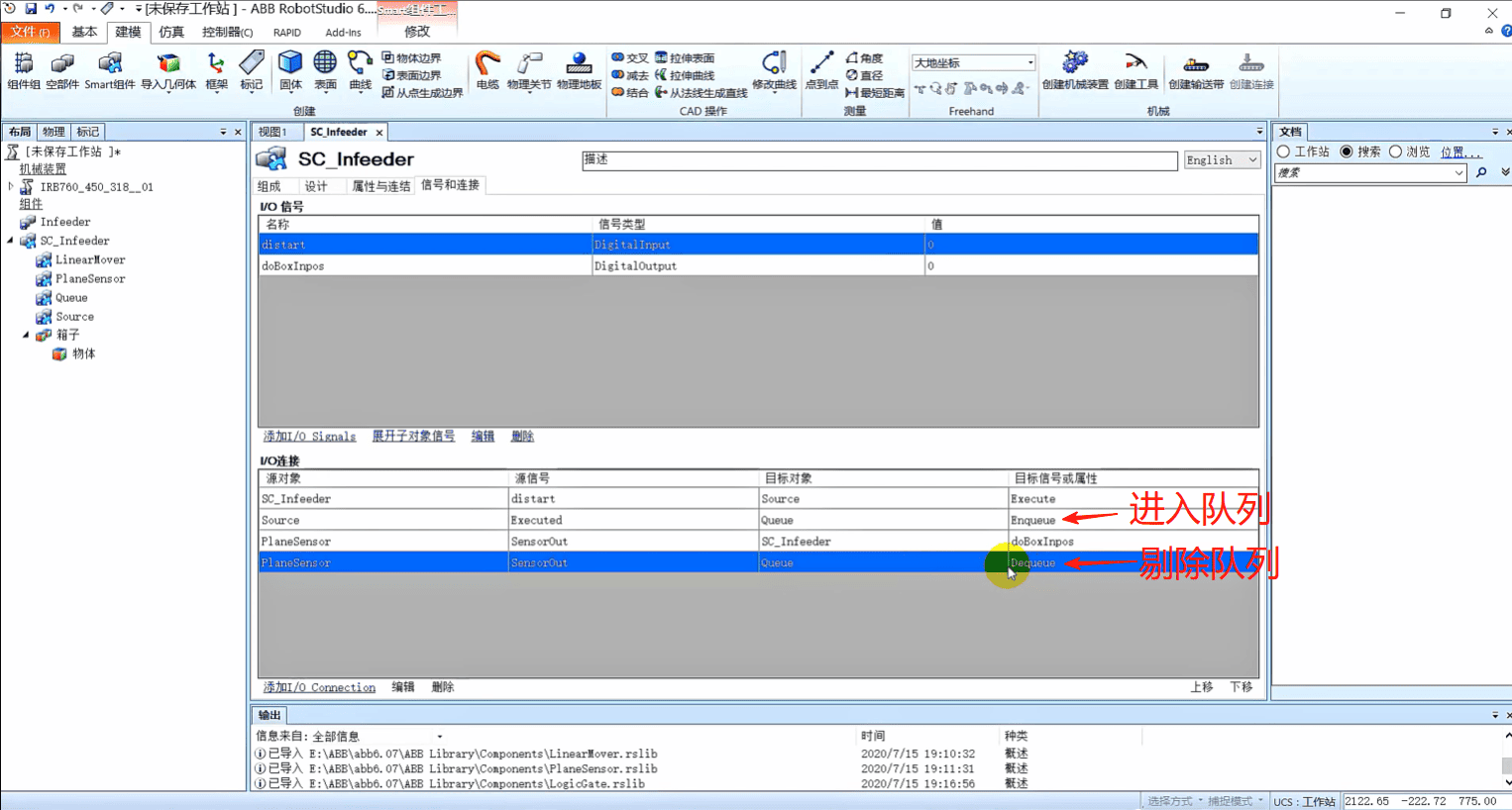
加一个启动信号,点击[添加i/O_Signals],点击[确定]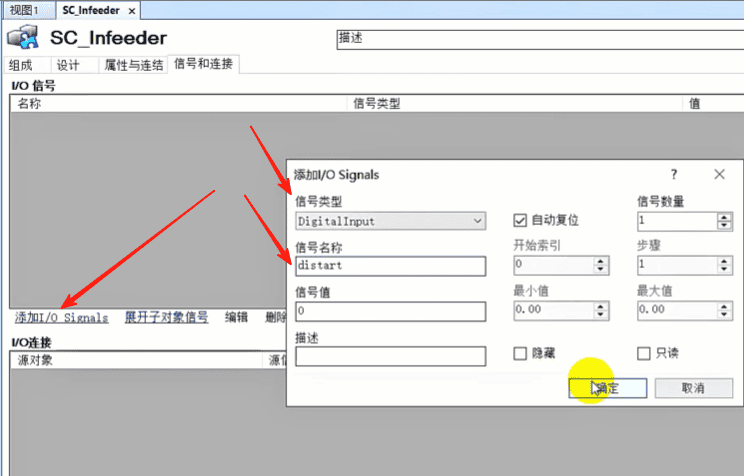
当传感器检测到箱子到位这个信号,将信号发送出去,点击[信号和连接],[确定]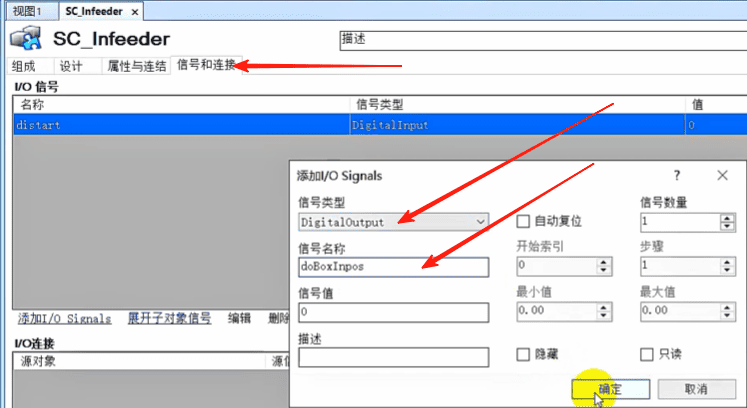
目前它只识别信号的上升沿,当机器人把箱子搬走以后,传感觉就由接通变不通了,
要利用这个信号,让下一个箱子过来,所以组件里面还要添加一个取反信号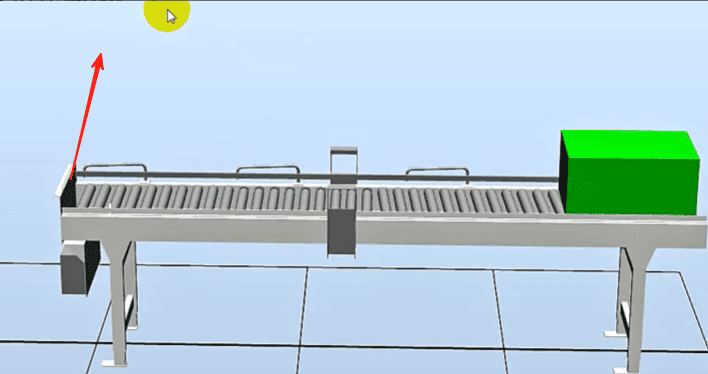
点击[添加组件],[信号和属性],[logicGate]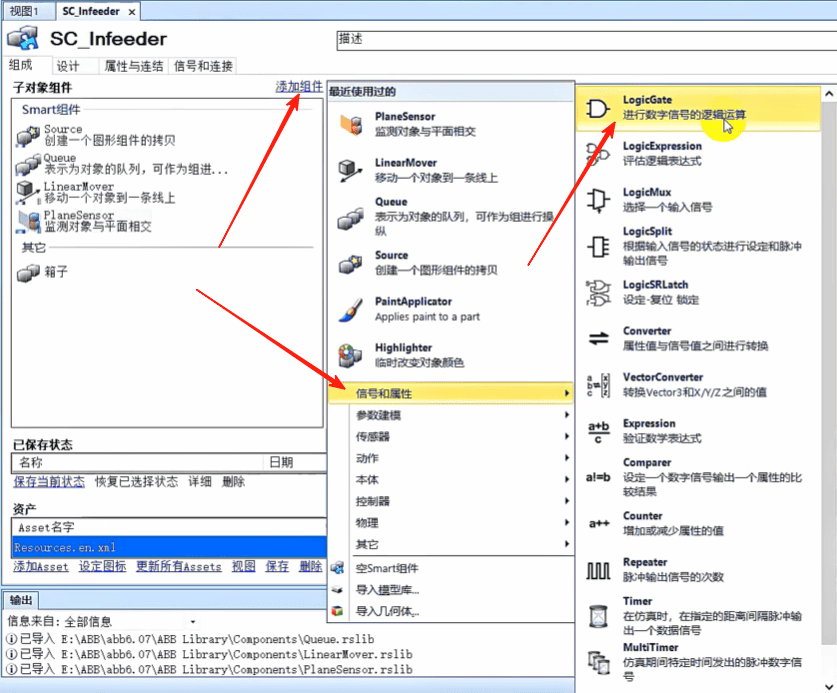
点击[信号和连接],点击[添加i/O Connection]
Sourece的执行就是复制一个产品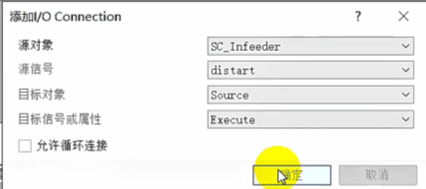
在单击[添加i/O Connection],又去出发一个加入队列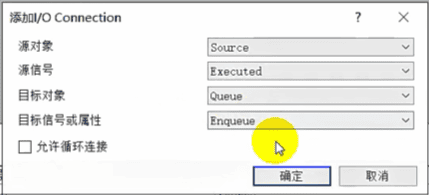
在单击[添加i/O Connection],传感器接收到一个信号,输送带就发出一个信号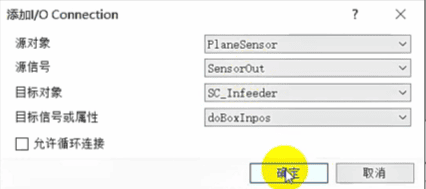
在单击[添加i/O Connection],传感器接收到信号,要剔除队列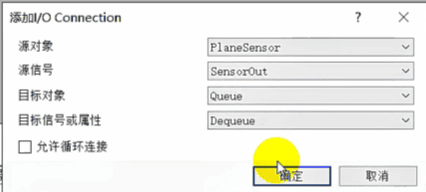
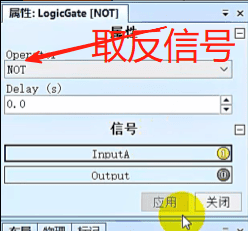
传感器检测到结果进行取反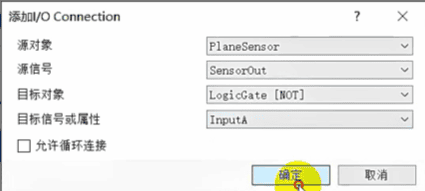
利用取反信号再去出发source的执行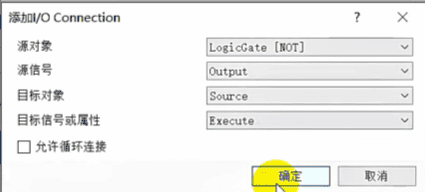
也就是说第一次需要手动开启,然后后面被激活以后可以自动运行实现循环