第十二章 2.ABB机器人码垛创建仿真工作站之smart组件创建动态夹具吸盘工具
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
smart组件创建动态夹具
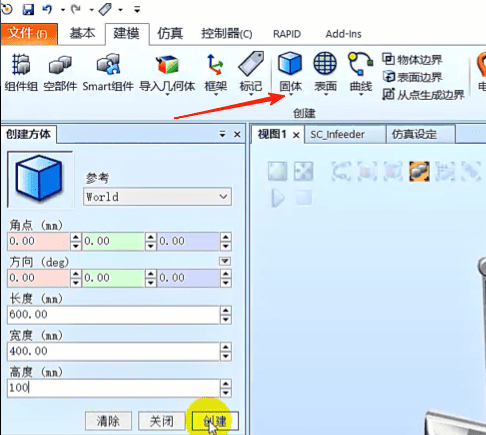
1.创建吸盘工具,修改颜色
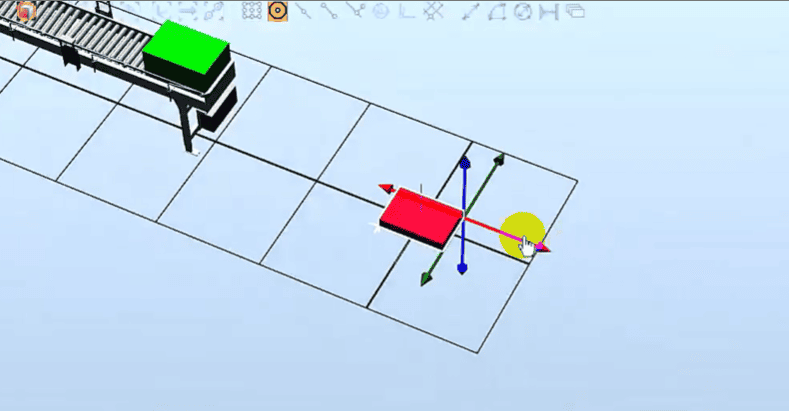
2.将吸盘的中心移到大地坐标原点
选择[部件][位置][放置][一个点]
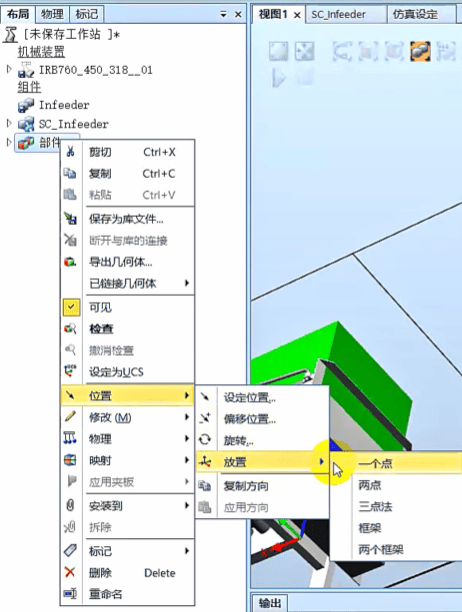
主点从吸盘中心到大地坐标原点,点击应用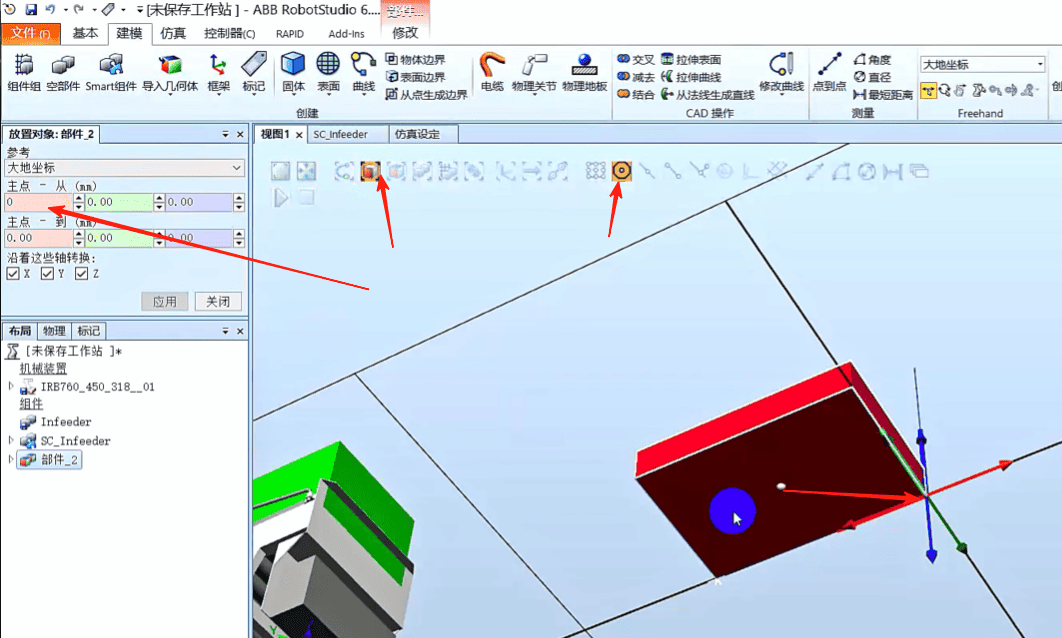
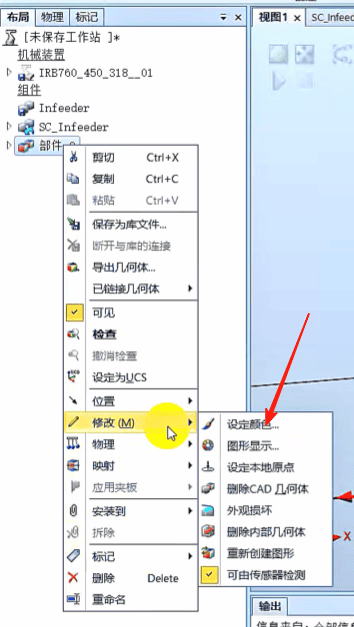
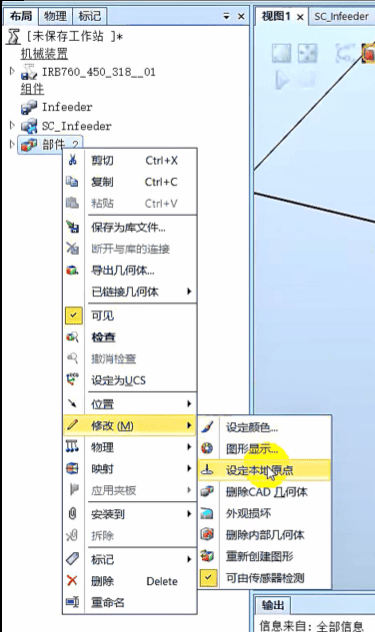
3. 修改吸盘工具的本地原点
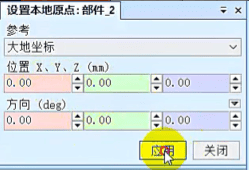
选择[部件][修改][设定本地原点]
全部改成0,点击应用
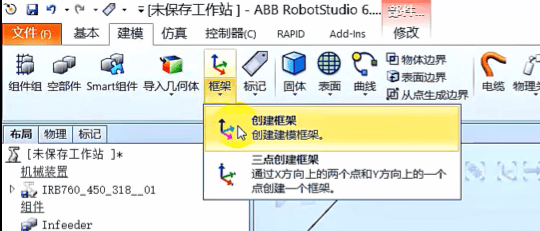
4.建立工具坐标系。点击框架,创建框架
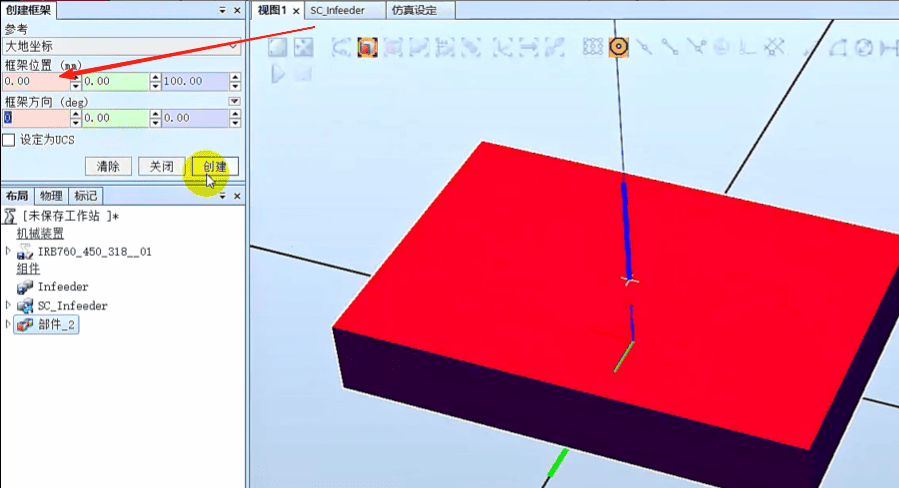
框架的位置选择上表面的中心位置,点击创建
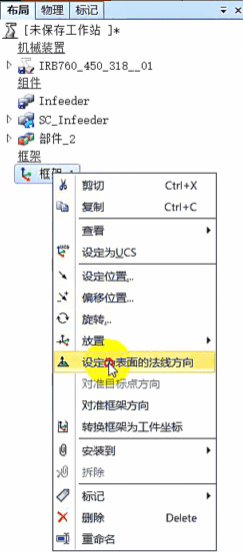
右击框架,选择[设定为表面的法线方向]
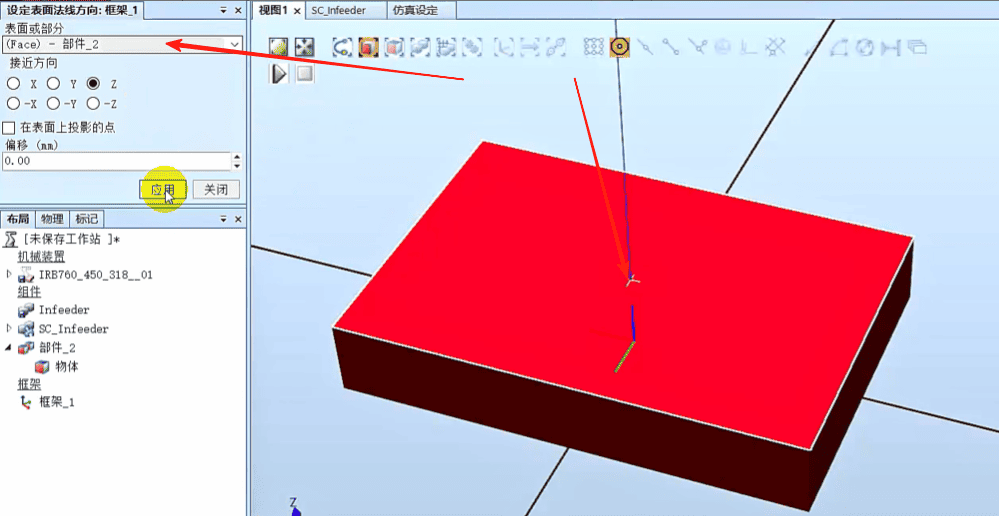
表面或部分选择上表面,点击[应用]
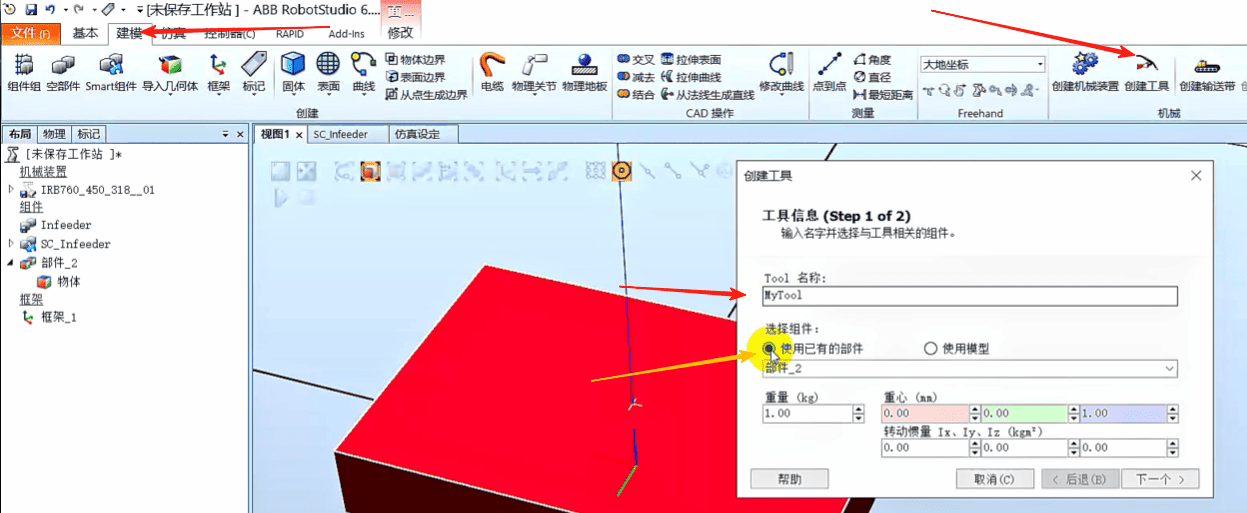
5.点击创建工具,选择使用已有部件,点击下一个
数值来自目标点/框架选择框架1,点击右箭头,点击完成
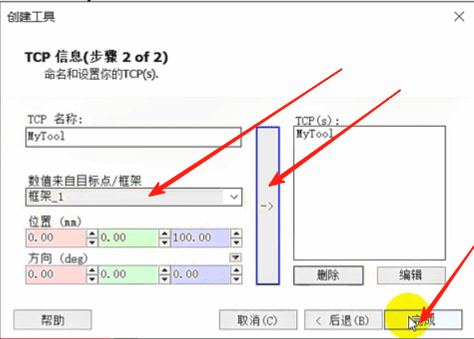
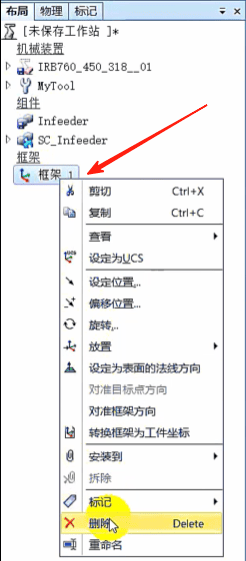
这样工具就创建好了,删除框架1
6.将吸盘安装到机器人上
按住拖到机器人上
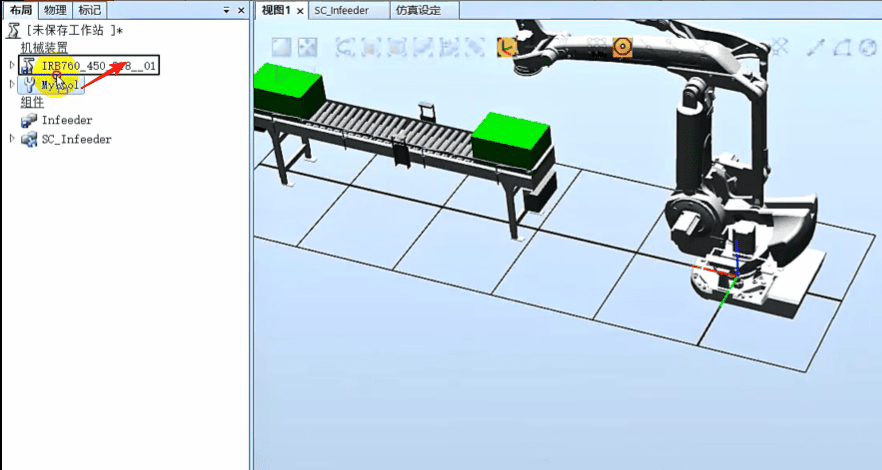
这样工具就装到机器人上了
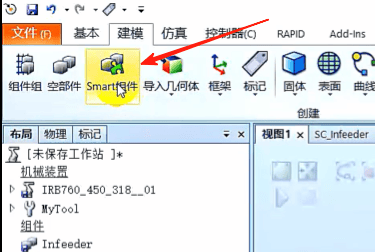
7.创建工具的Smart组件
点击Smart组件
右击重命名Smart组件为SC_Gripper
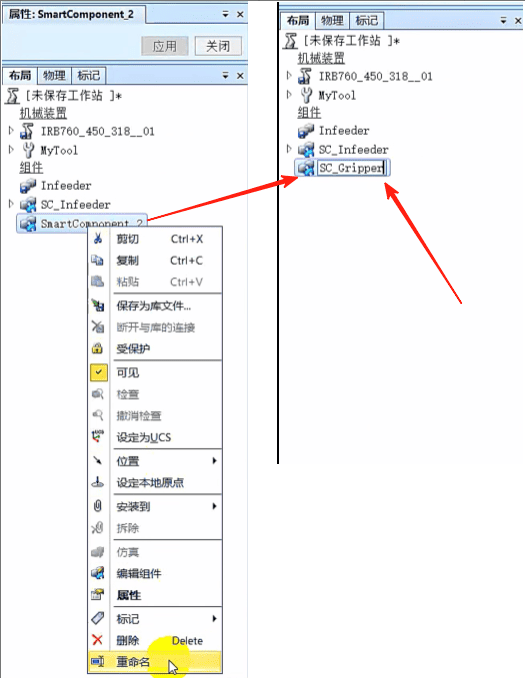
将吸盘工具放到Smart组件里面
这样Smart组件就会随着机器人一起动
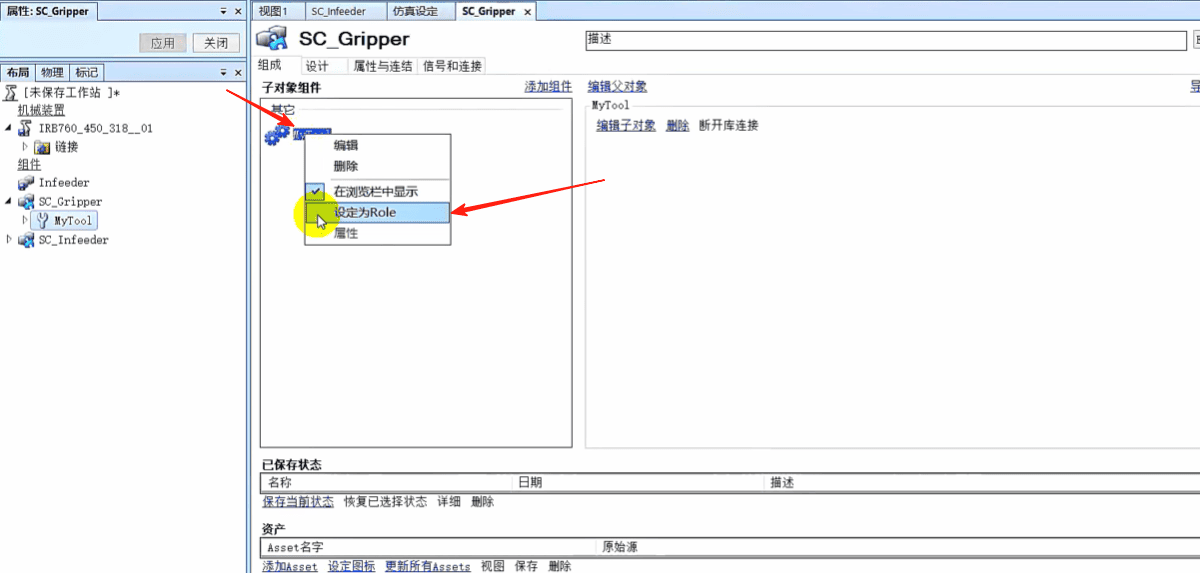
8.右击SC_Gripper,选择 编辑组件
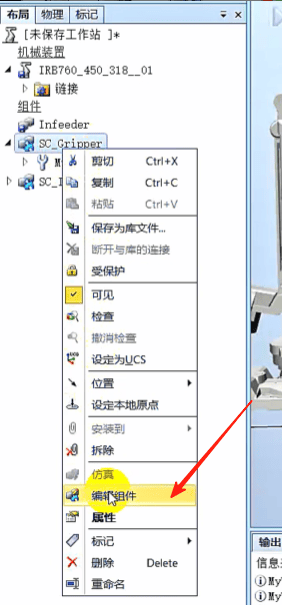
让Smart组件拥有工具属性,右击MyTool,设定为Role
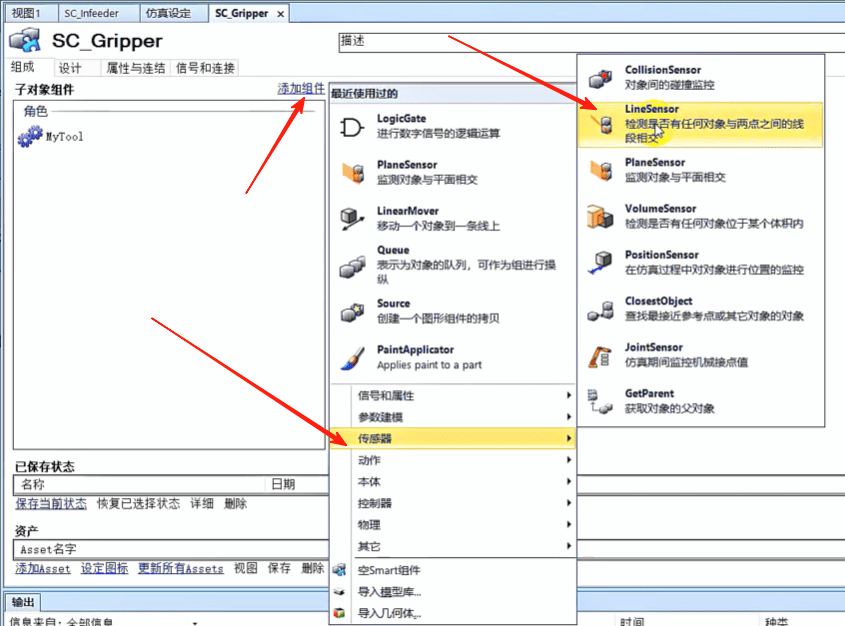
点击[添加组件][传感器][LineSensor]
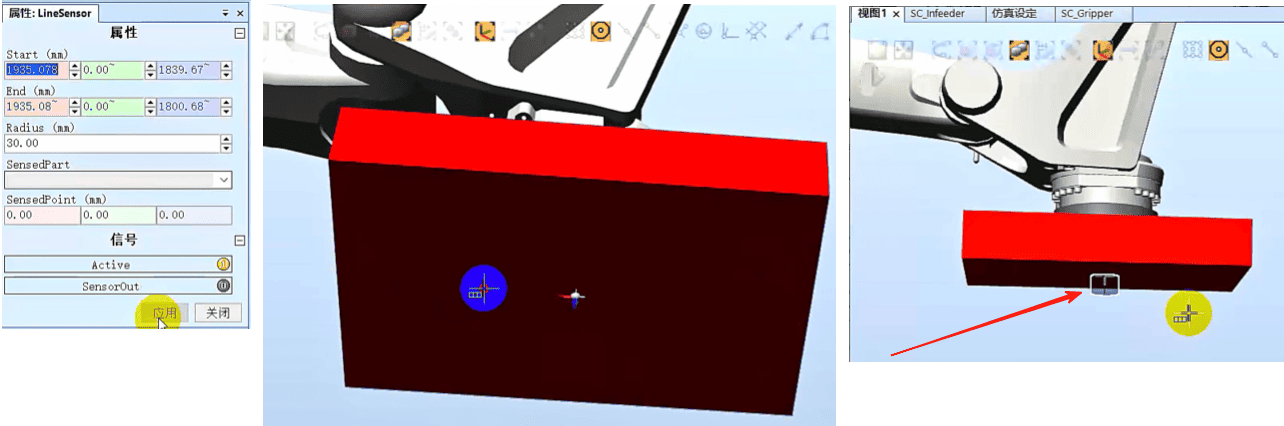
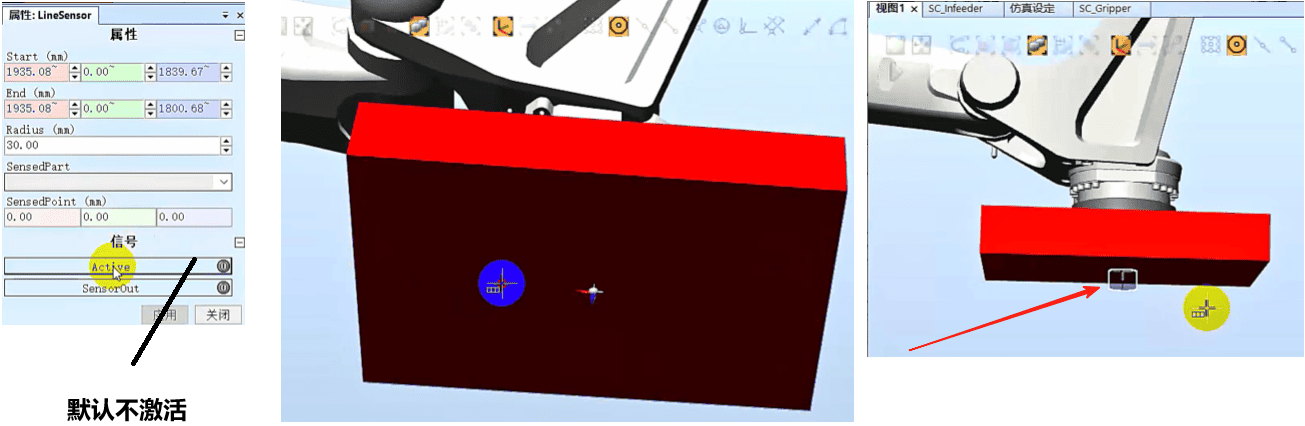
将传感器建在吸盘的底部中央
稍后这个传感器会检测到有没有抓到箱子,如果抓到箱子会把箱子吸起来
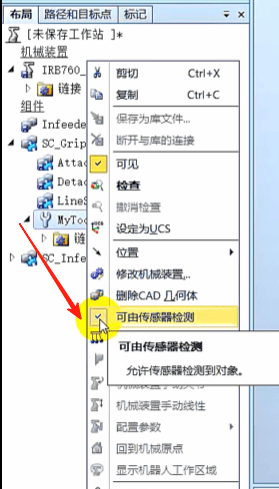
右击工具,去掉 可由传感器检测
点击[添加组件][动作][Attacher]
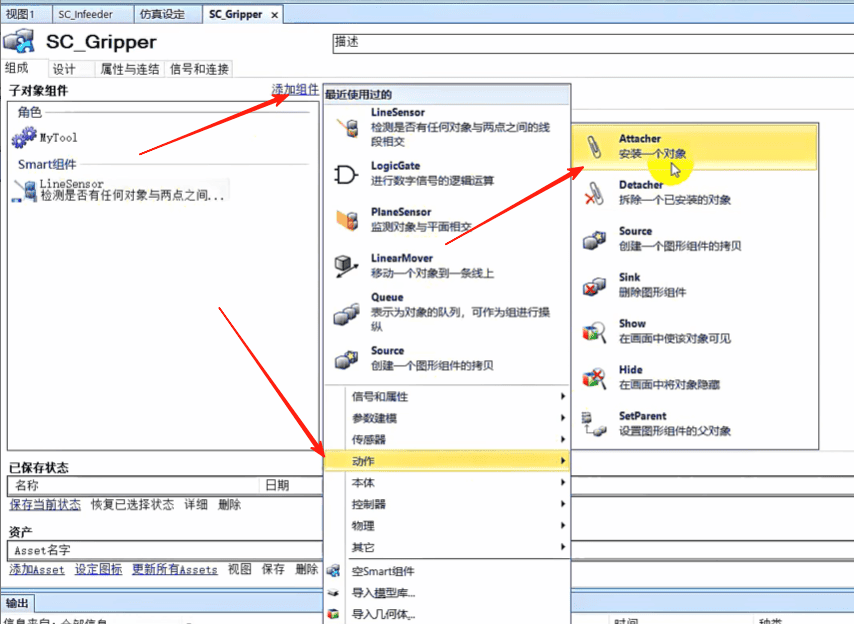
父对象就是工具,子对象就是传感器检测到的对象
点击[添加组件][动作][Detacher]拆除一个对象,直接点应用

添加一个取反信号,[添加组件][添加组件][LogicGate]

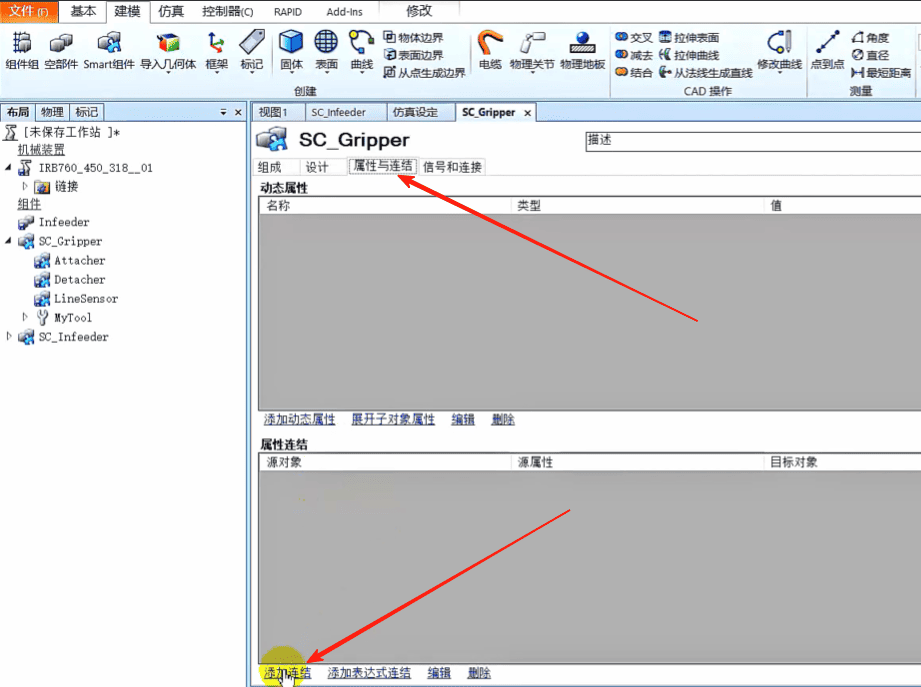
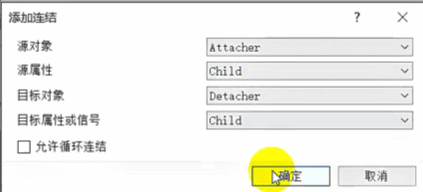
选择[属性与连结][添加连结]
传感器检测到的对象,就是要吸附的对象
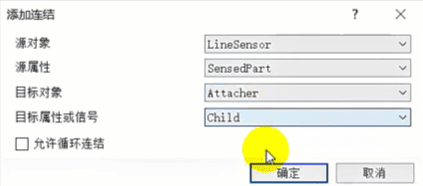
吸附的子对象,就是要释放的子对象
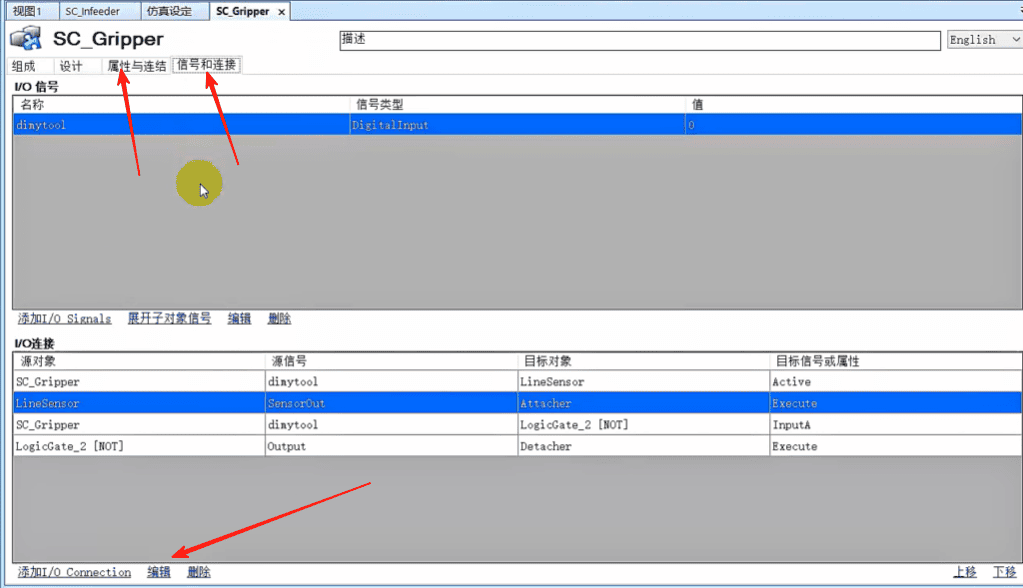
点击[信号与连接],添加I/O___Signals
来控制吸附还是释放抓取对象的
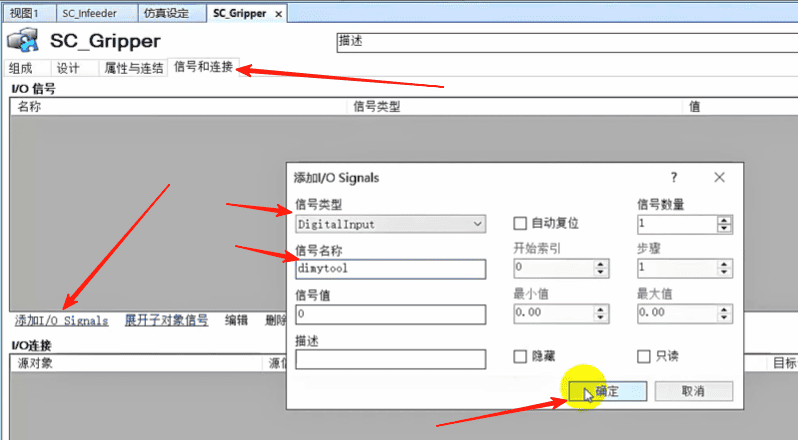
点击[添加I/O___Signals]
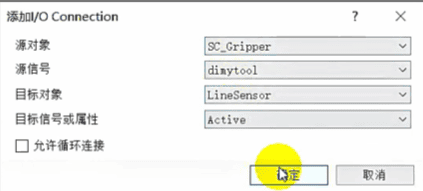
触发线性传感器的有效激活
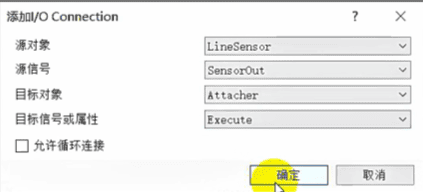
线性传感器的对象触发吸附动作Attacher的执行
点击[添加I/O___Signals],传感器信号取反
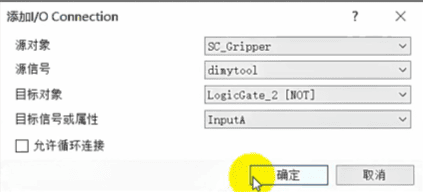
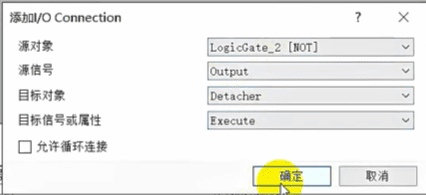
用取反信号对Detacher的执行
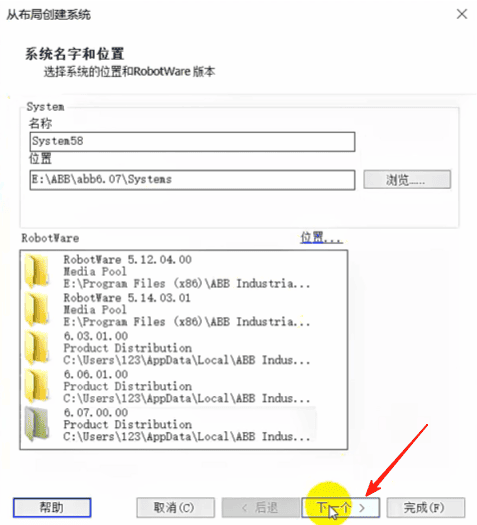
点击 [机器人系统] [从布局]
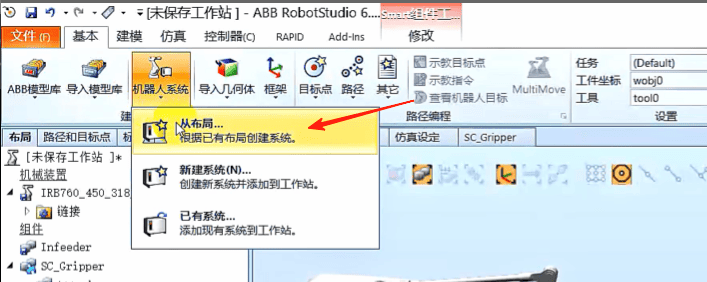
下一个
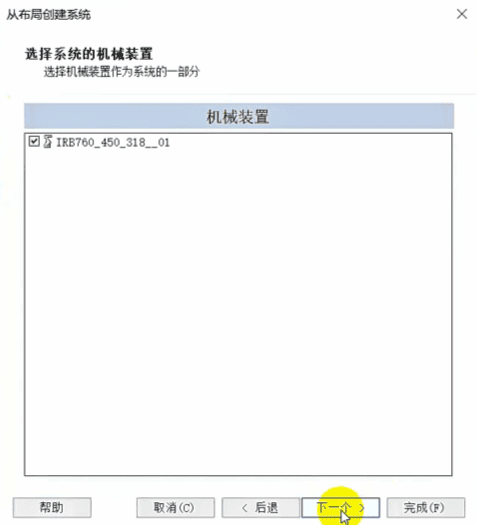
下一个
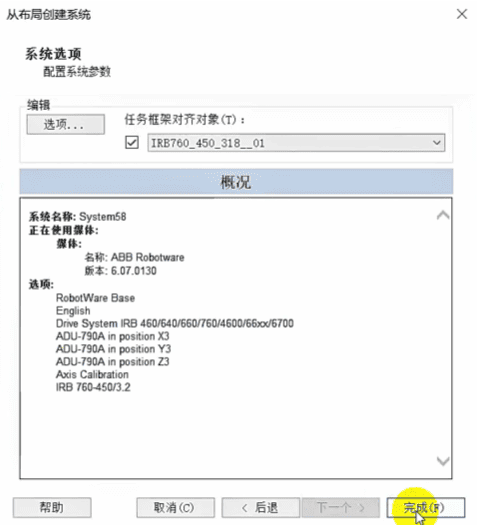
点击[完成]
检测吸盘抓取
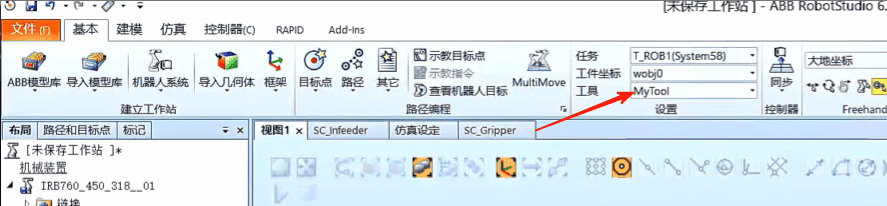
选择MyTool工具
选择捕捉圆心 捕捉表面,将吸盘移到箱子上
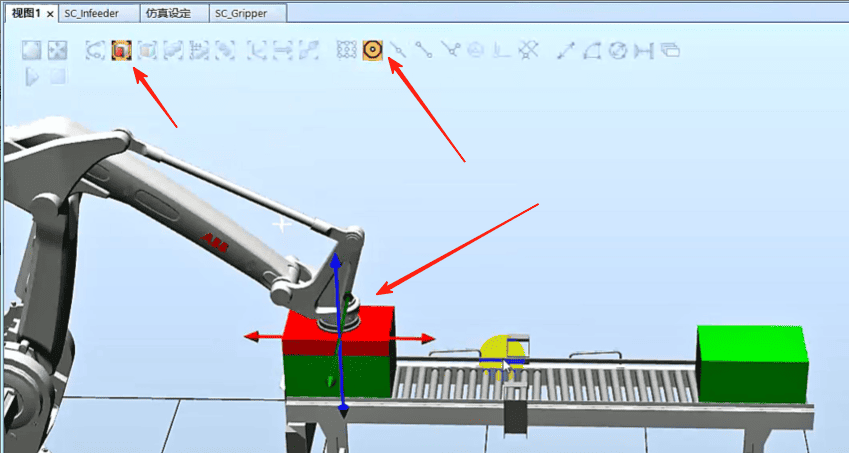
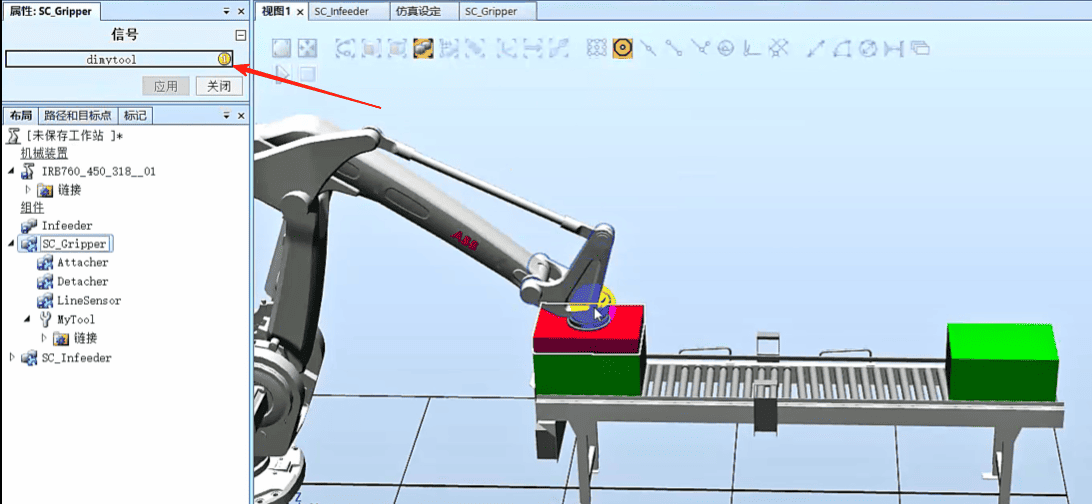
点击[SC_Gripper]
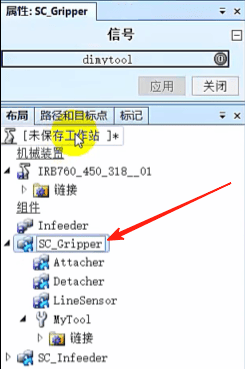
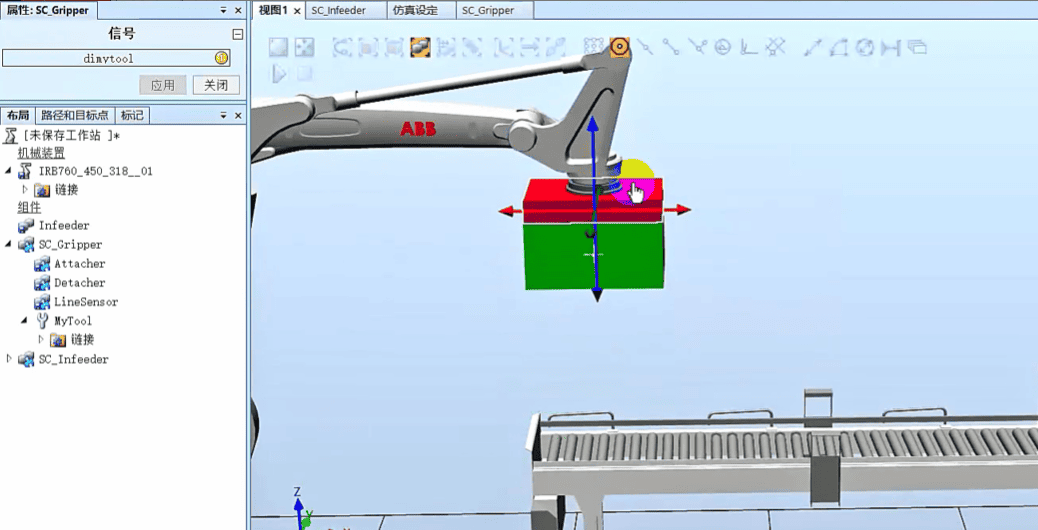
启动dimtool
移动机器人,吸住箱子一并抬起
松开,放下箱子

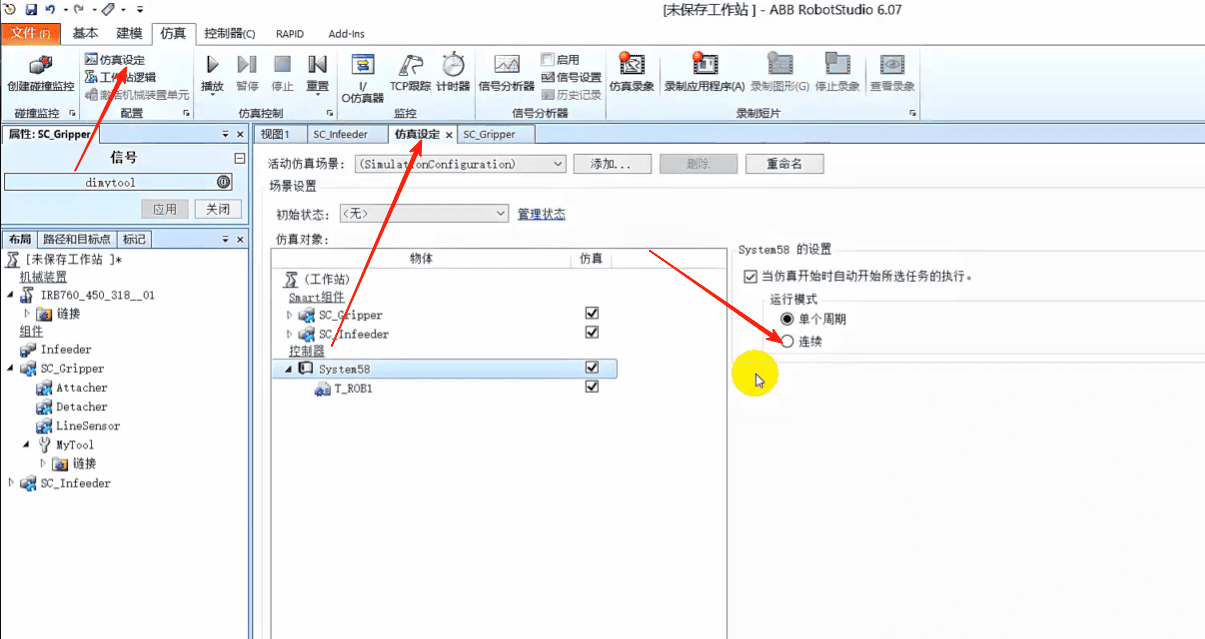
点击[仿真设定],选择连续
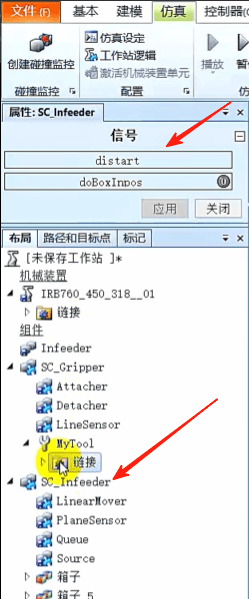
双击[SC_Infeeder]
点击[distart]启动