第十二章 3.ABB机器人码垛仿真工作站之smart信号关联与码垛程序的三个基础示教点(安全点、抓取点、放置点)
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
如何将系统信号和Smart组件信息进行关联
Smart组件相当于一个PLC,
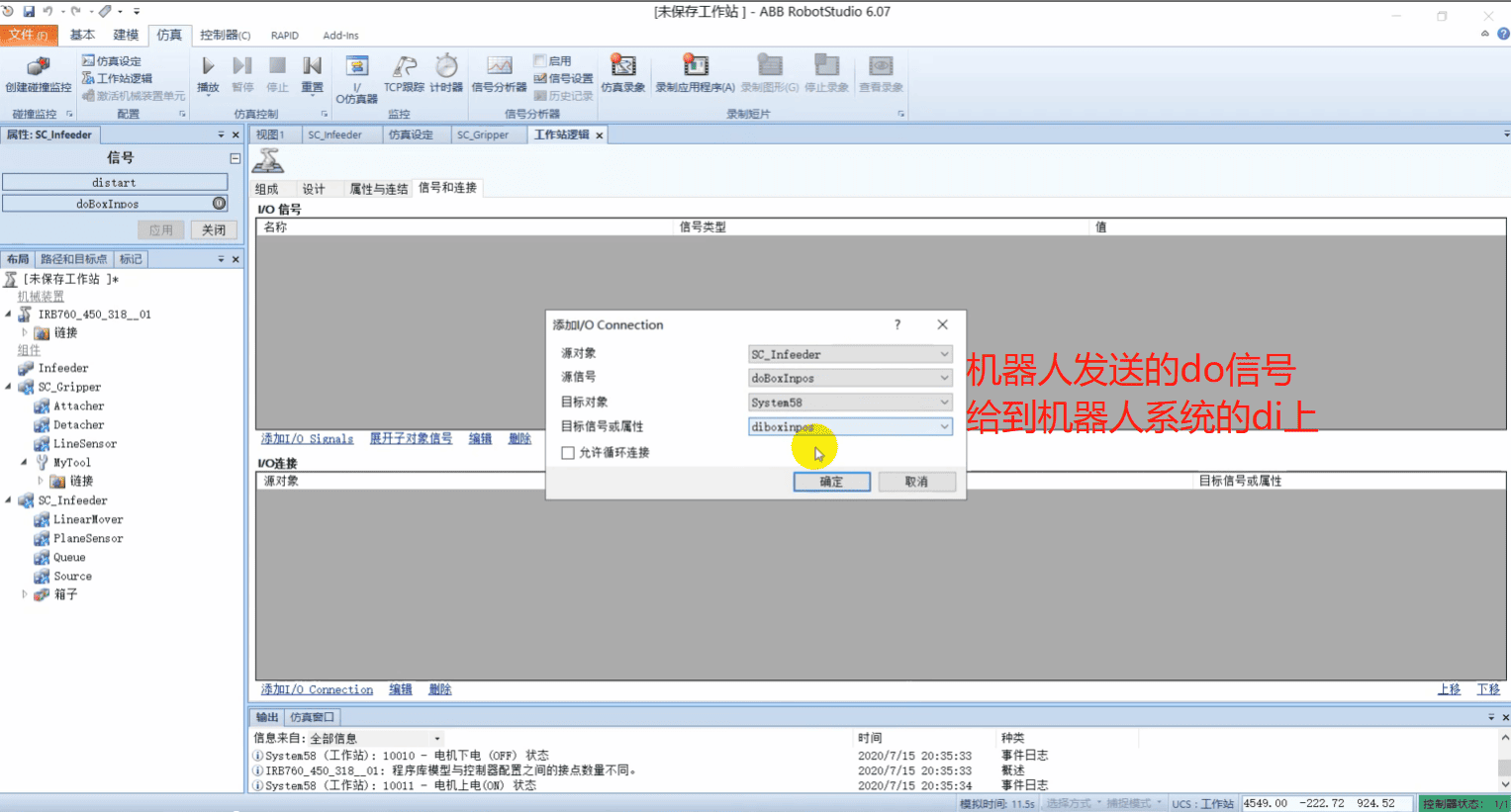
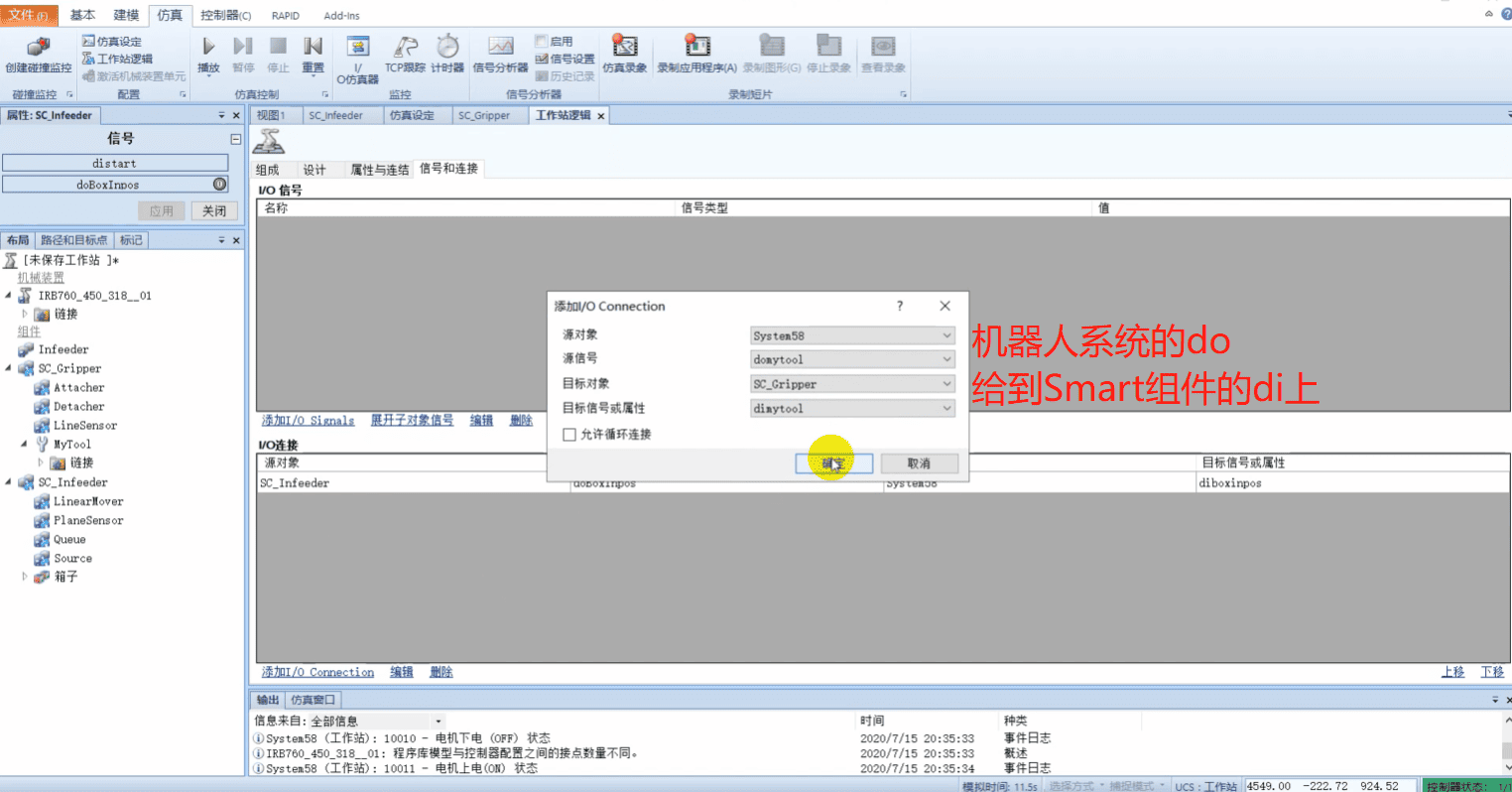
当机器人人系统要抓取的时候,机器人系统要发生出去一个信号,那么对于Smaert组件来说就是一个输入信号,所以是di信号,
比如箱子到达左边,被传感器检测到以后,输送带有个信号要发送出去,告诉机器人系统信号到了
1. 去机器人系统建2个信号,点击控制器,配置,【I/O System】
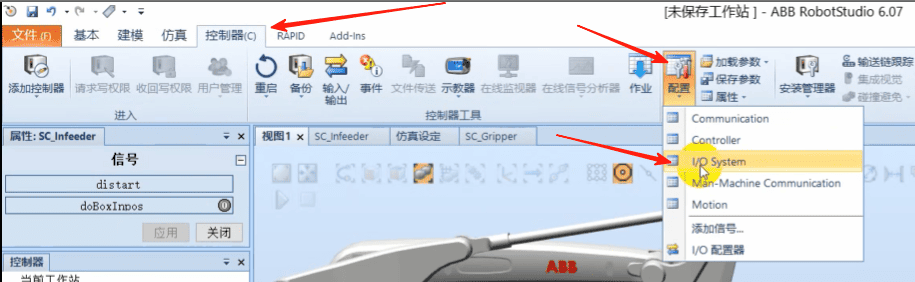
点击Signal,右键 新建Signal
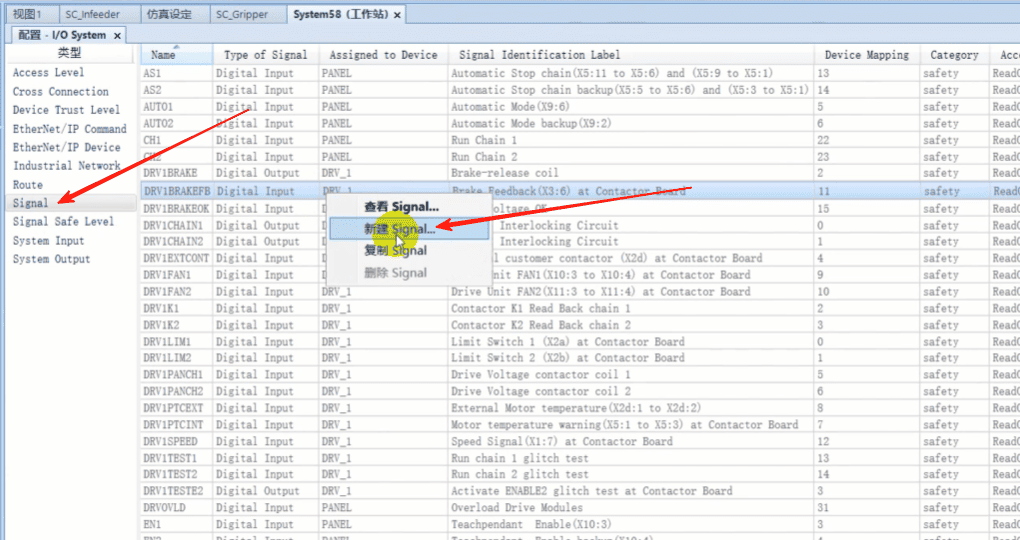
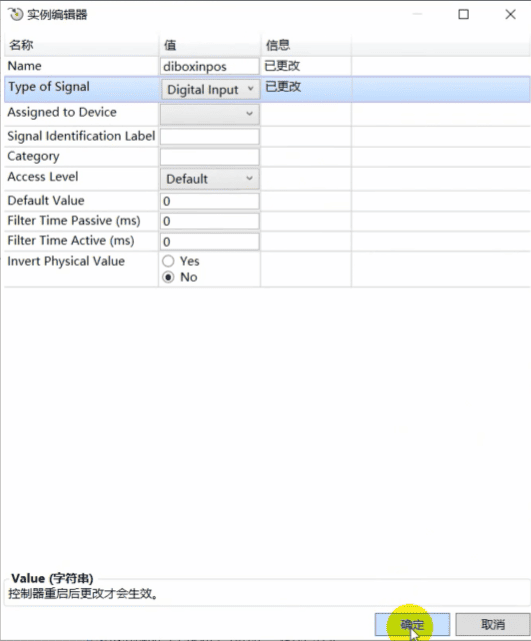
新建一个di信号,是输送带到了末端传感器检测到以后发出的
点击Signal,右键 新建Signal
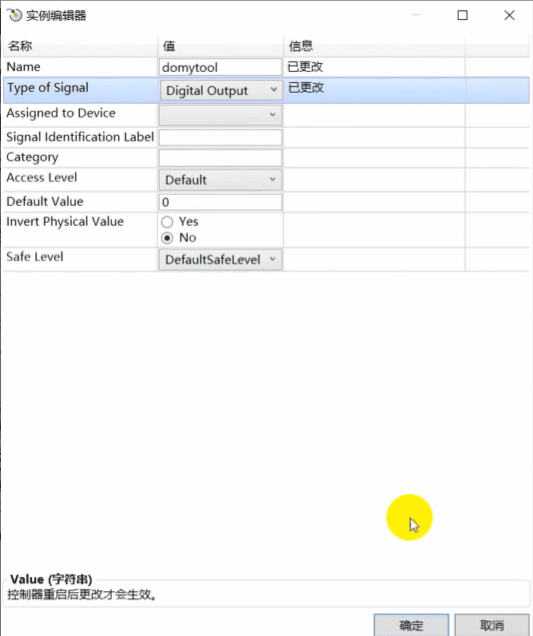
新建一个do信号,机器人系统发送出去的信号给工具Smart系统的dimytool上
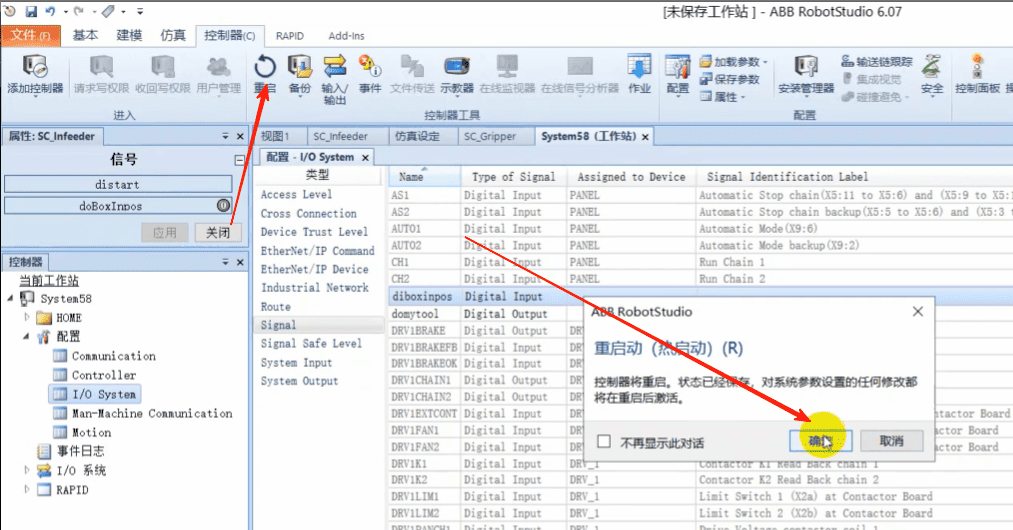
点击重启生效
2. 点击仿真,工作站逻辑
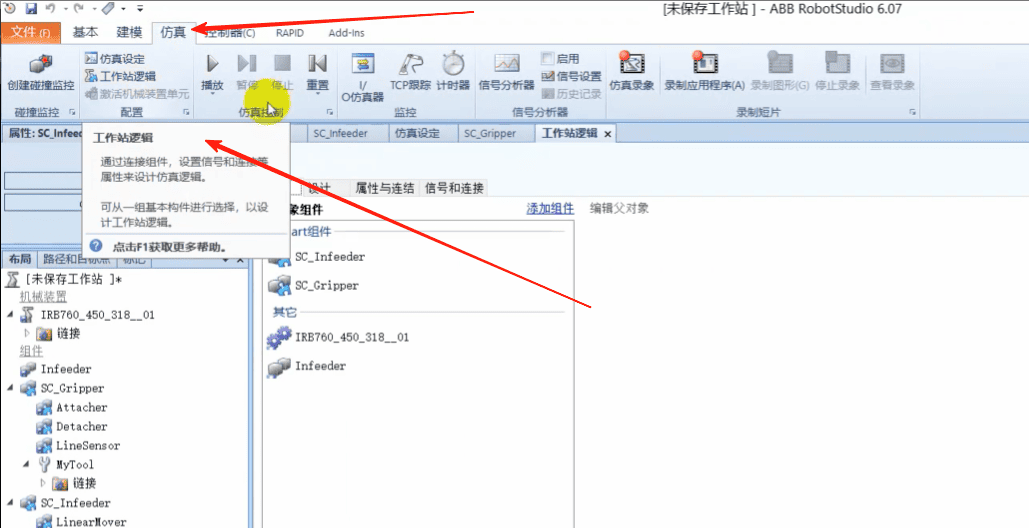
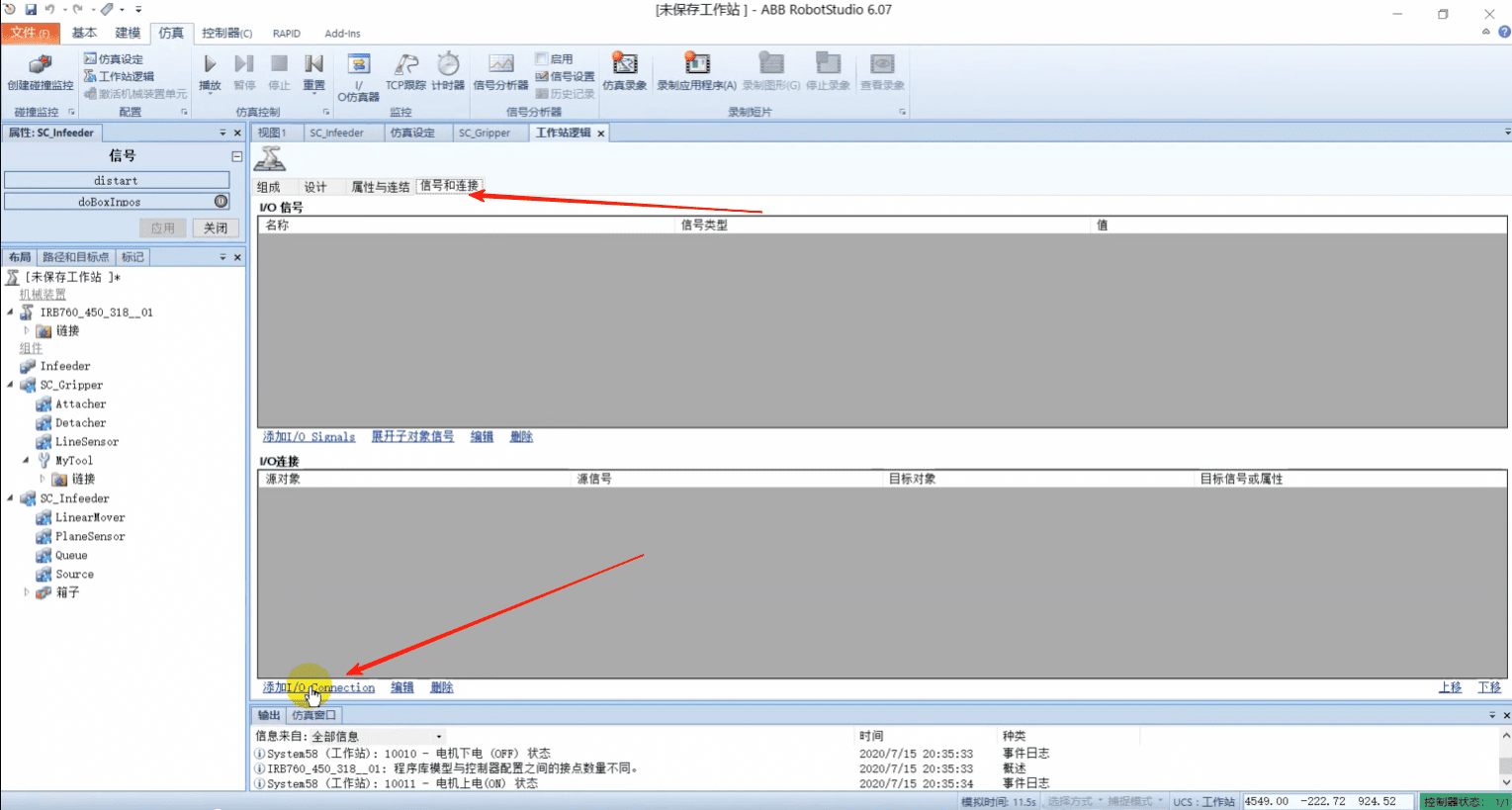
这样就能用机器人系统的信号去控制Smart组件的信号

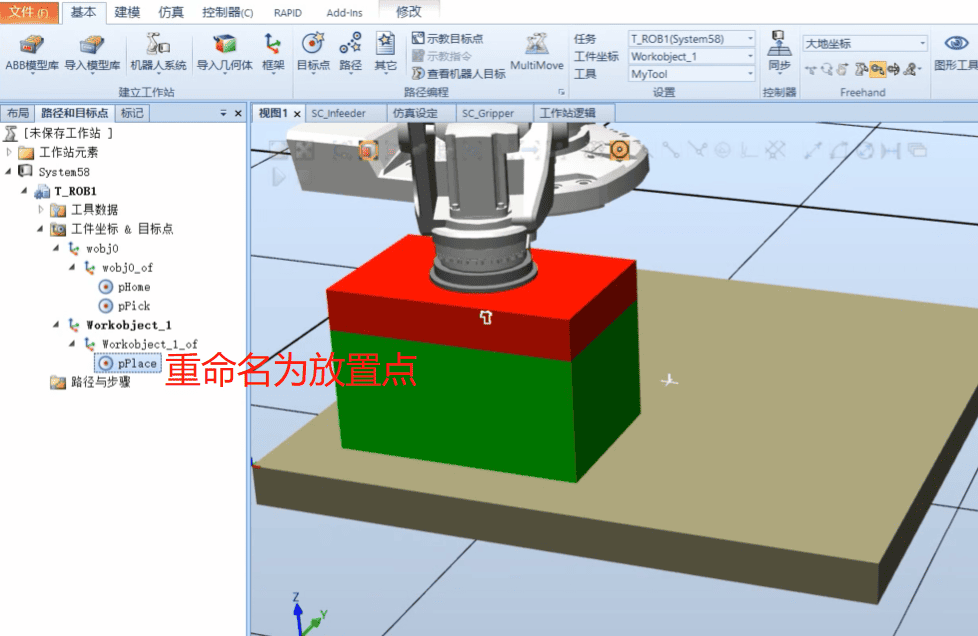
写程序之前,先给工作站画一个托盘,将箱子码到一个托盘上
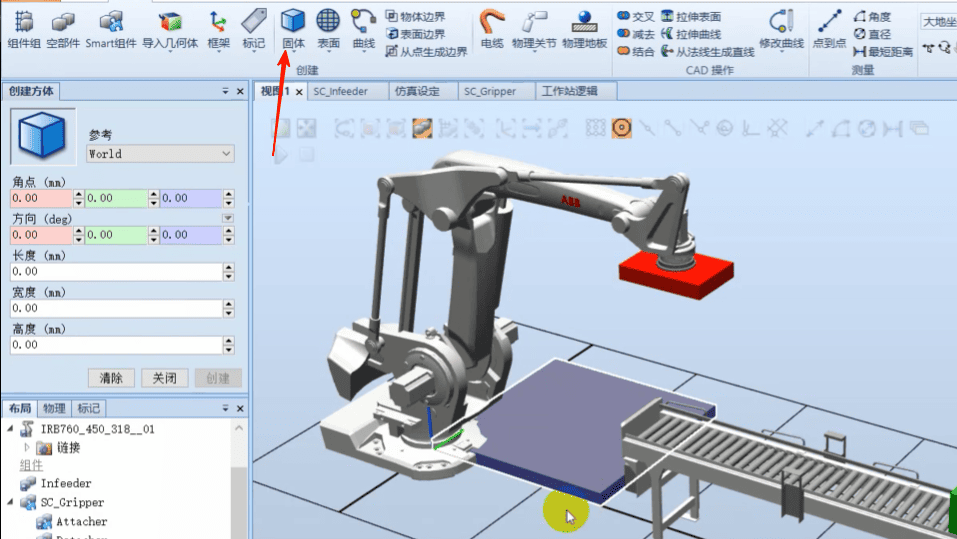
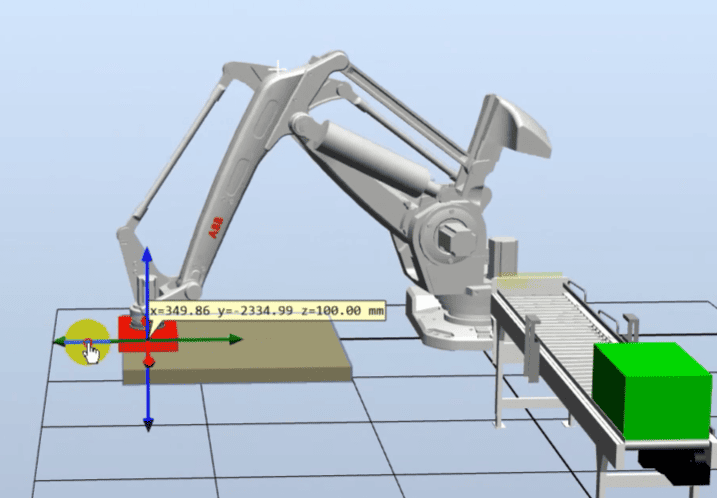
测试机器人能不能够到托盘
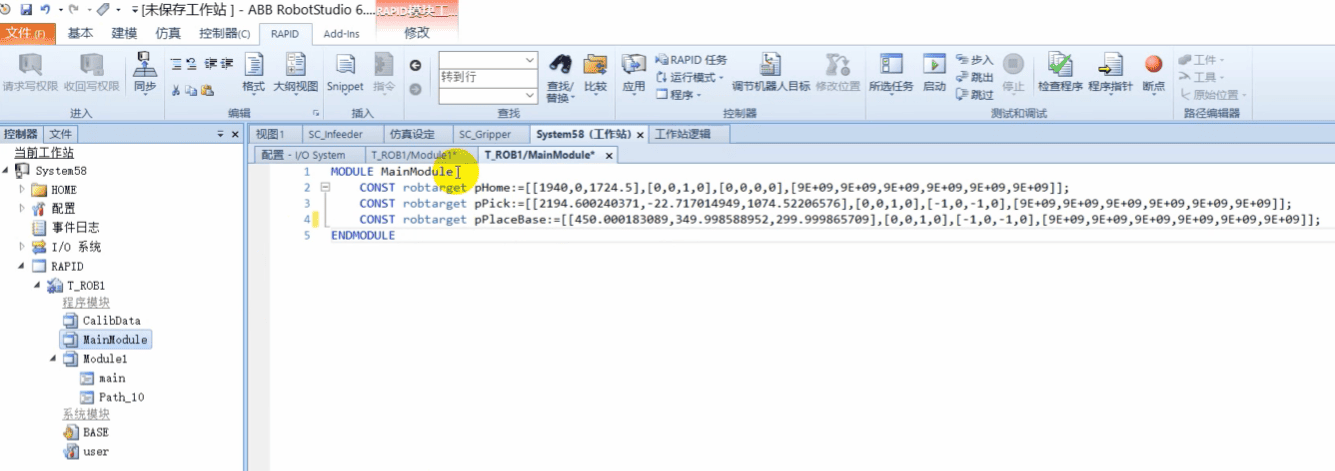
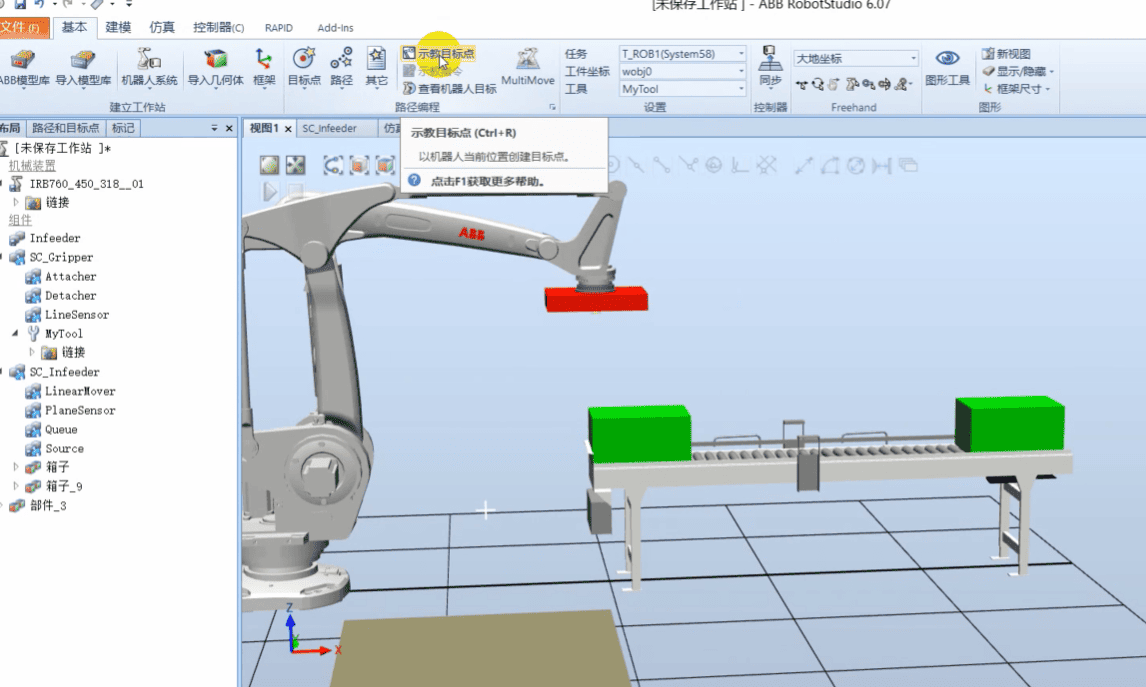
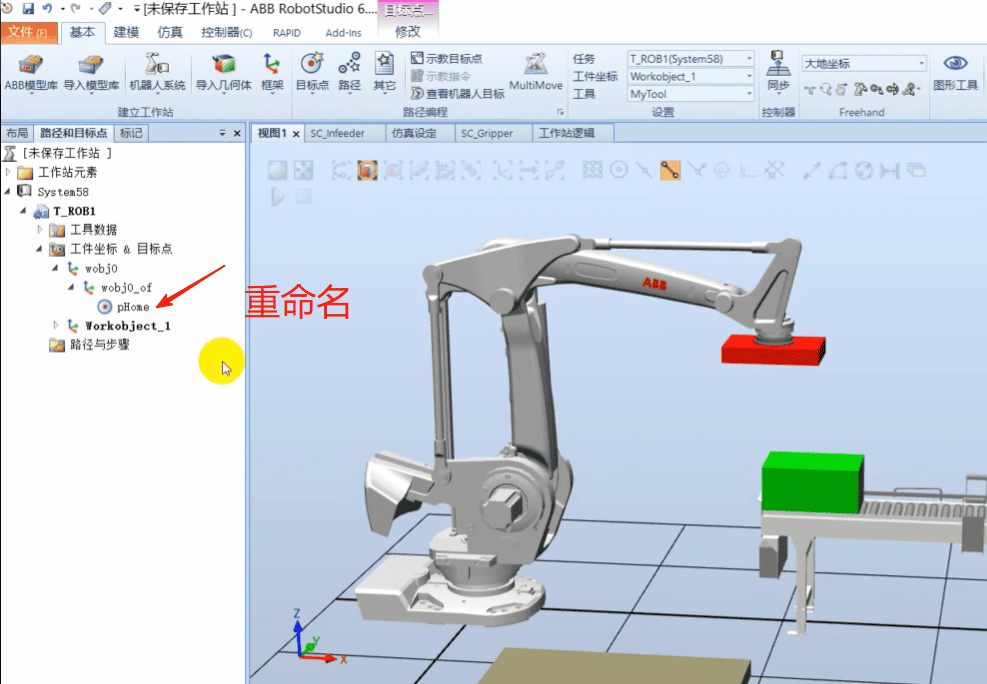
示教目标点 安全点phome
示教抓取点
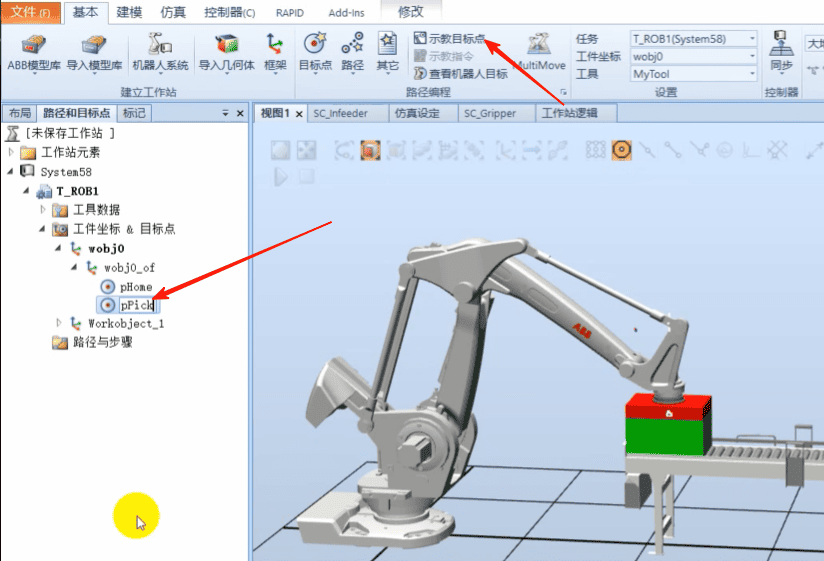
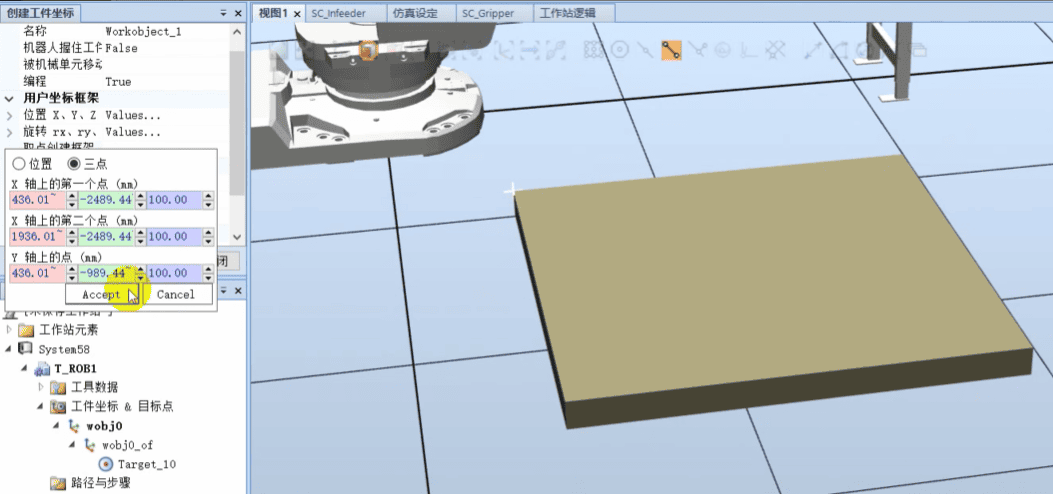
示教抓取的基准点
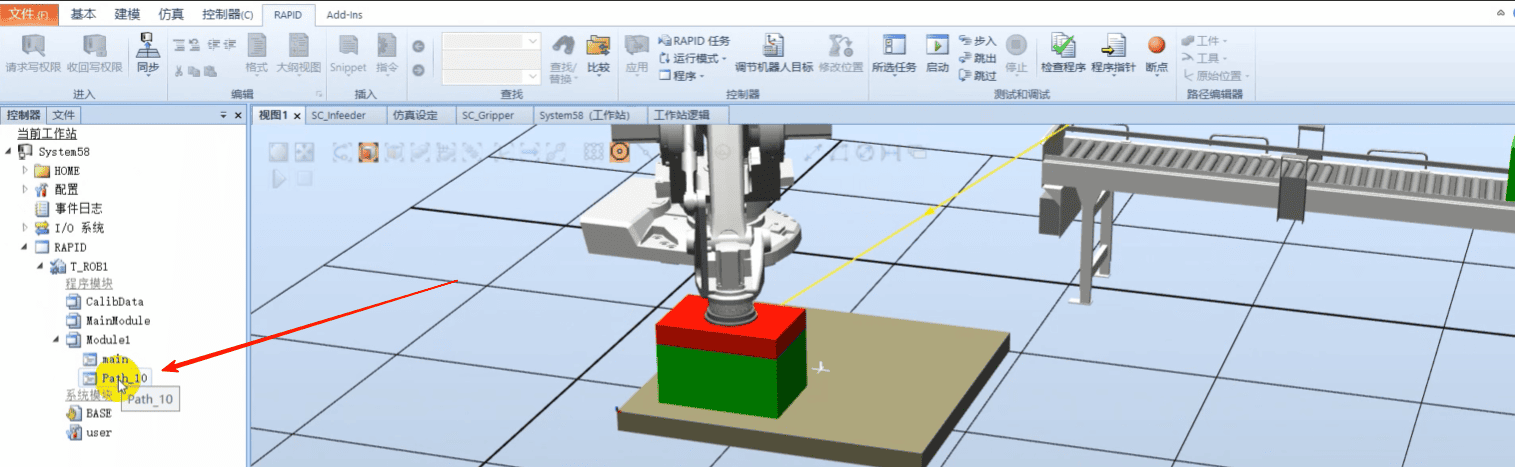
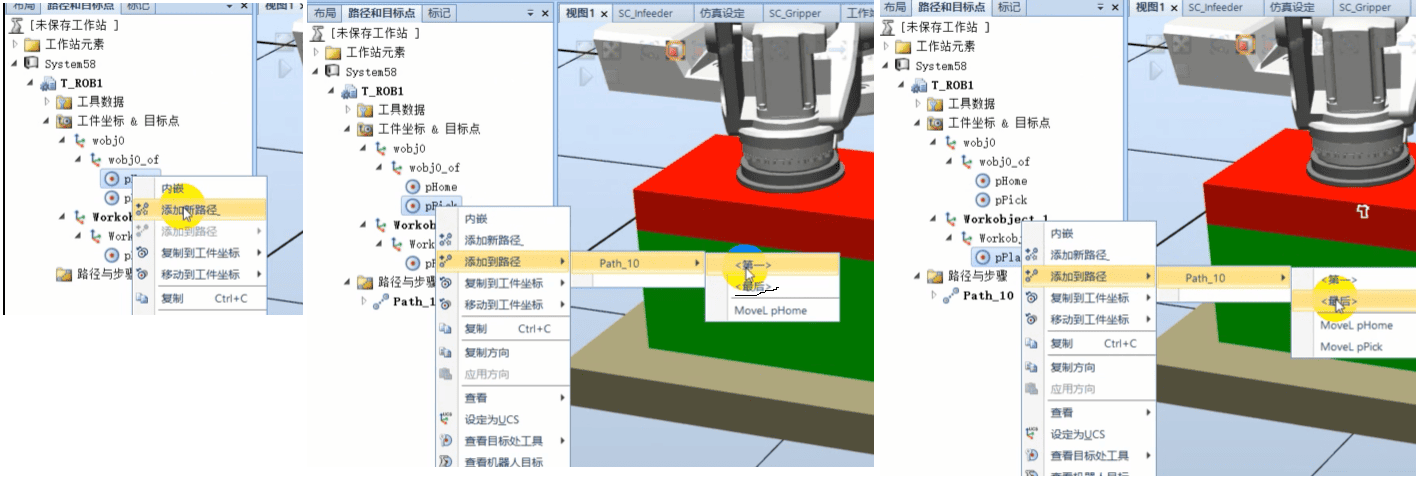
给三个点添加新路径
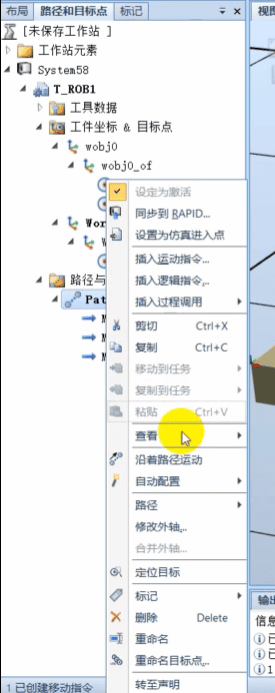
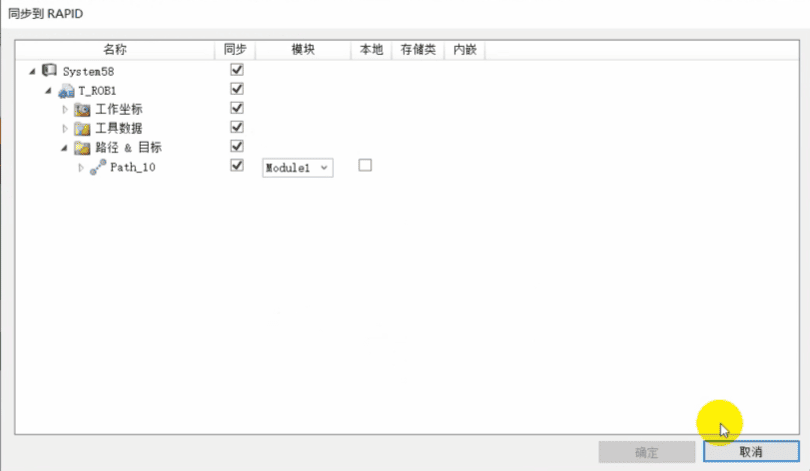
将路径同步到RaPID
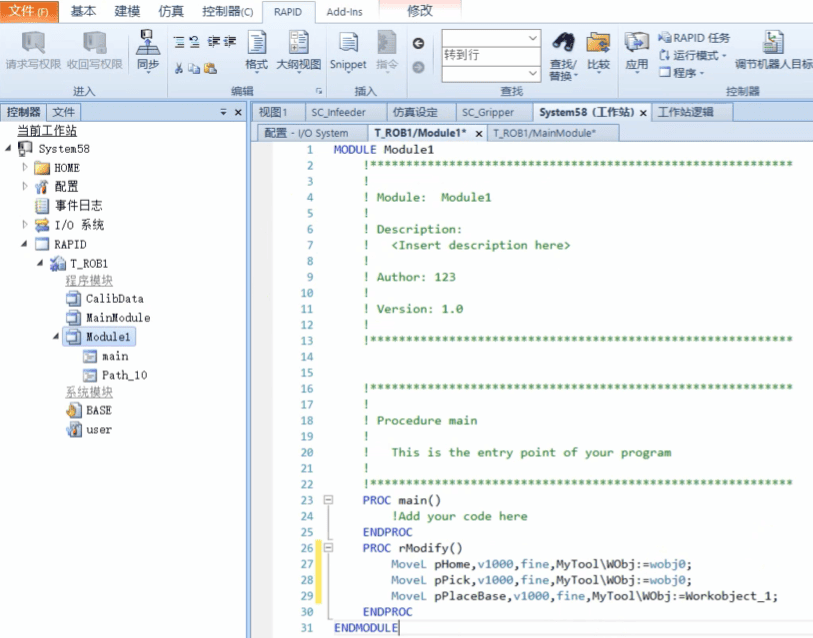
写程序