第十章 ABB机器人如何使用自定义工具
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
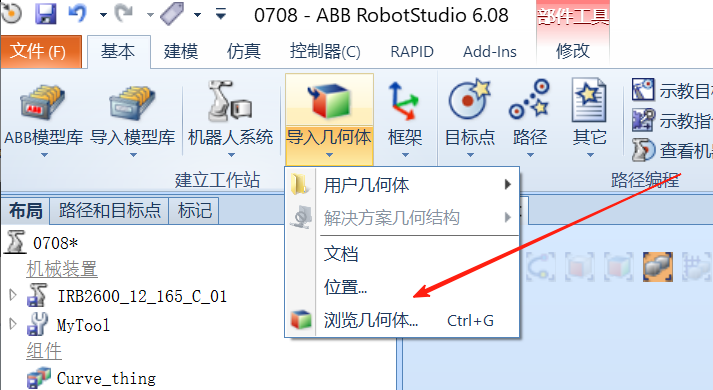
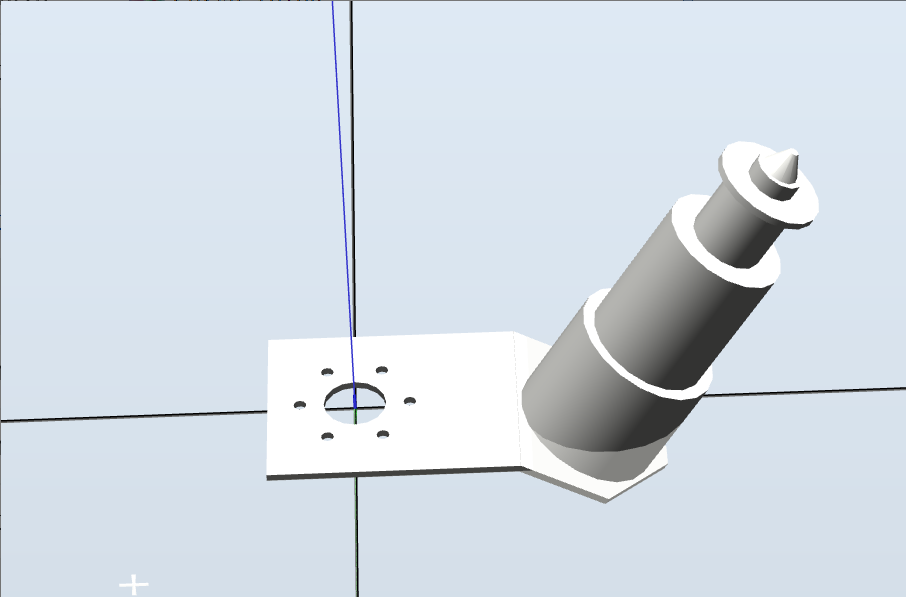
创建自定义工具
点击导入几何体 选择一个SAT文件
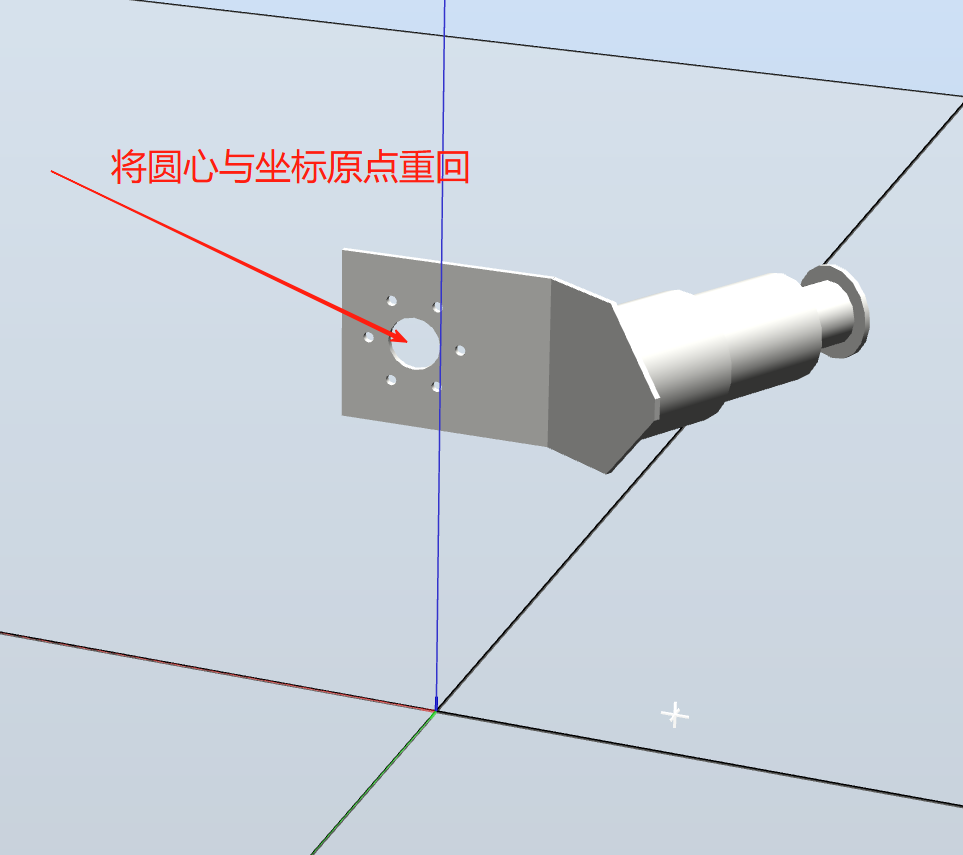
将工具坐标与大地坐标原点重合
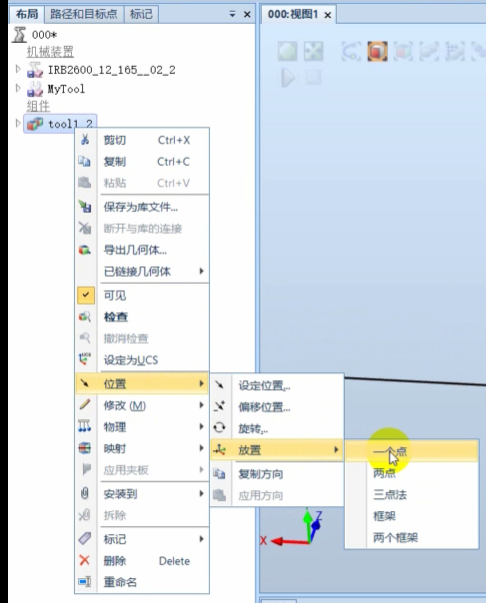
右键,位置,放置,三个点
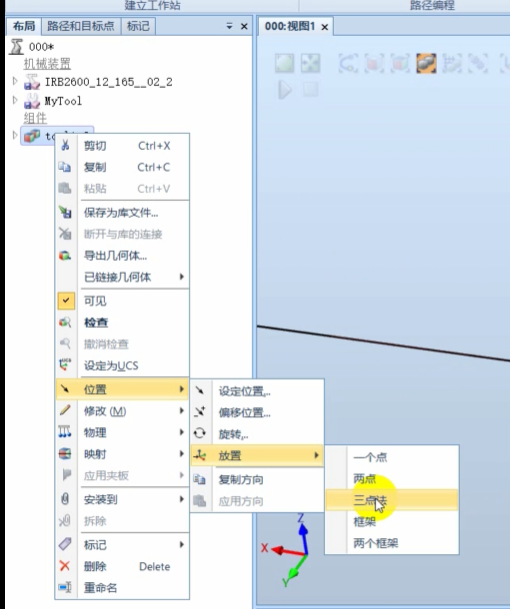
选择捕捉
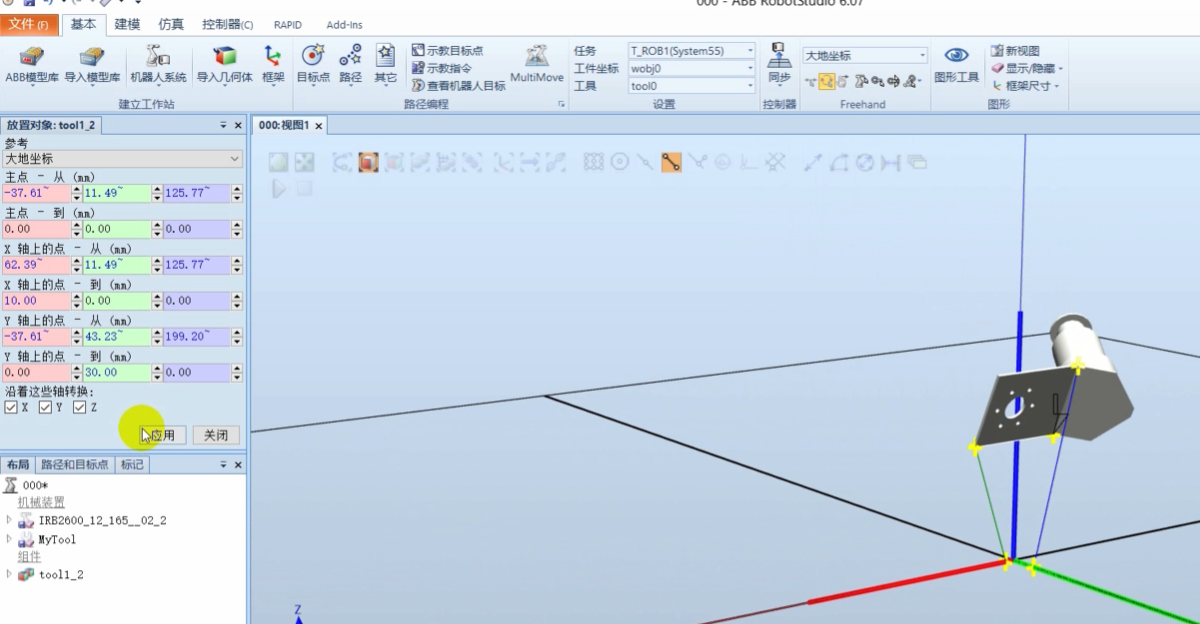
点击应用,如下
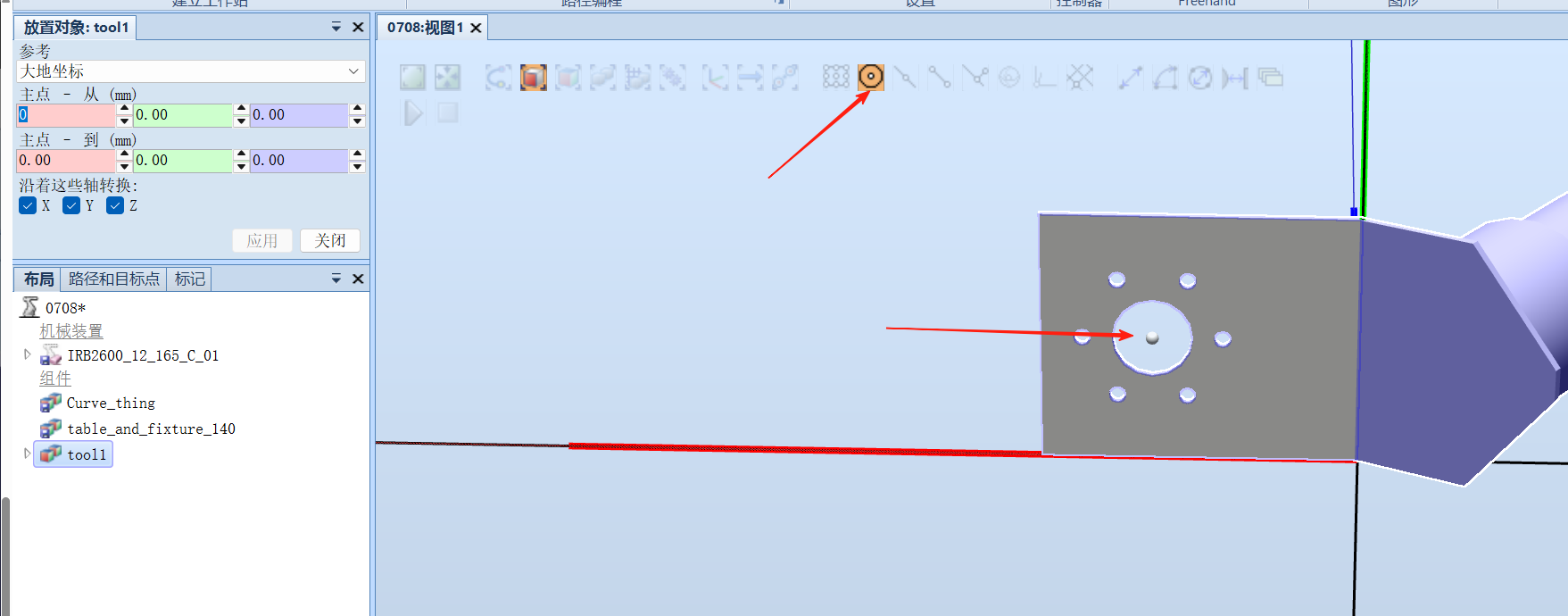
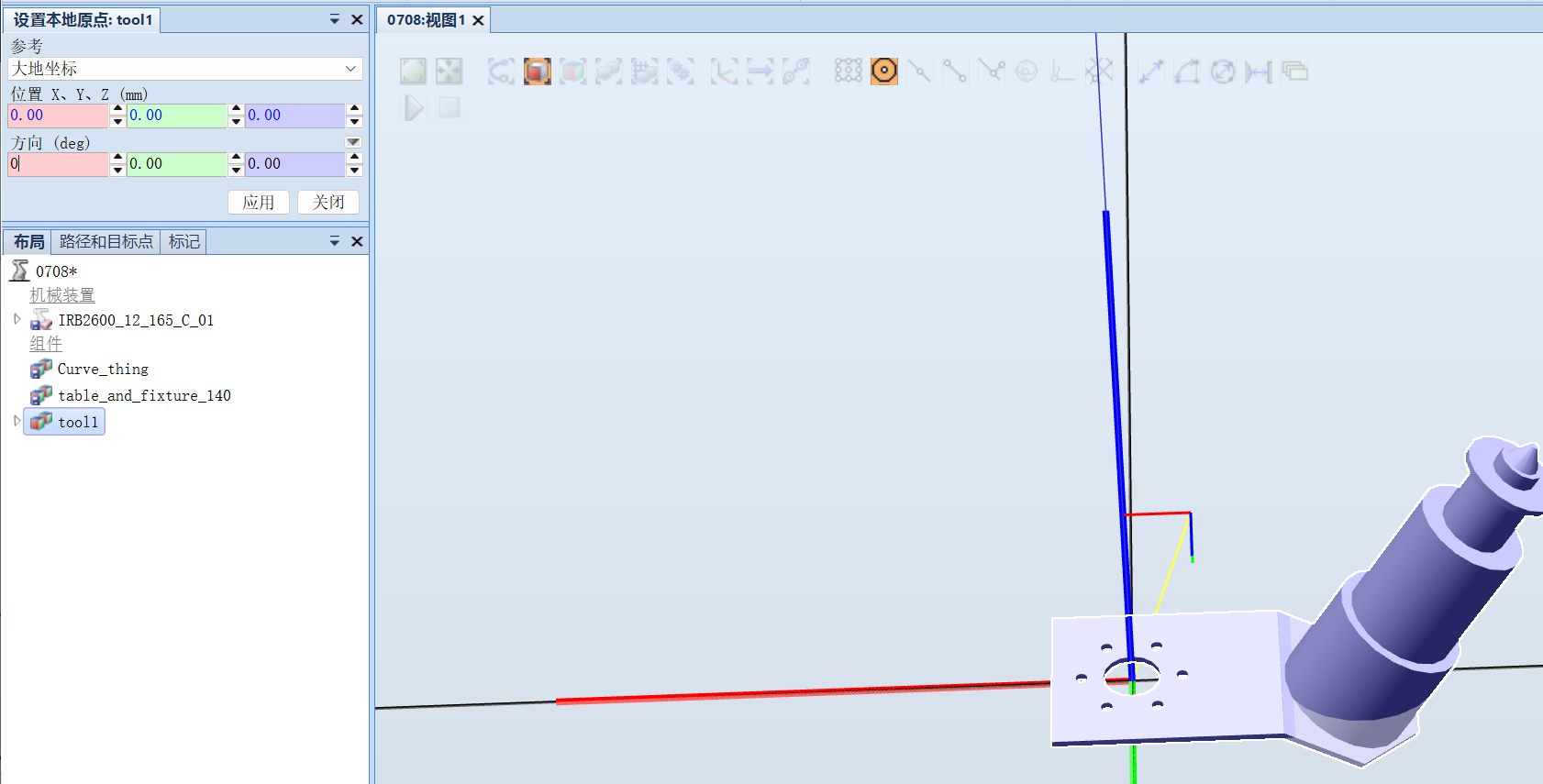
在方式一次,使得原点与大地坐标原点重合
1点法
捕捉圆心,到大地坐标原点
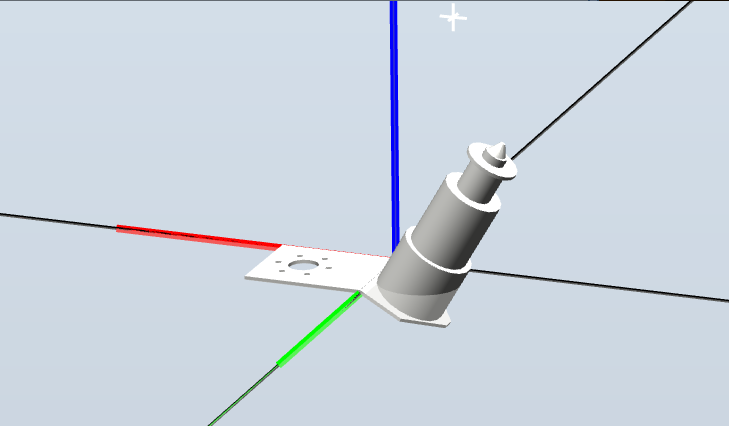
如图所示
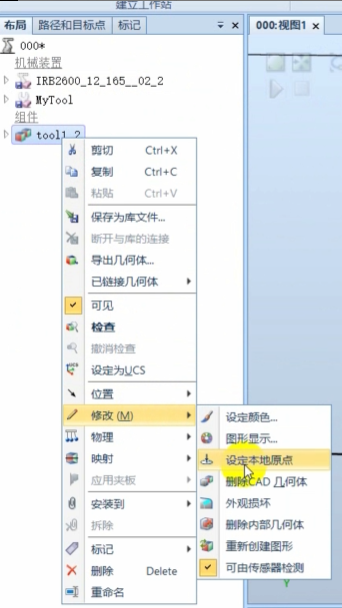
设置本地原点
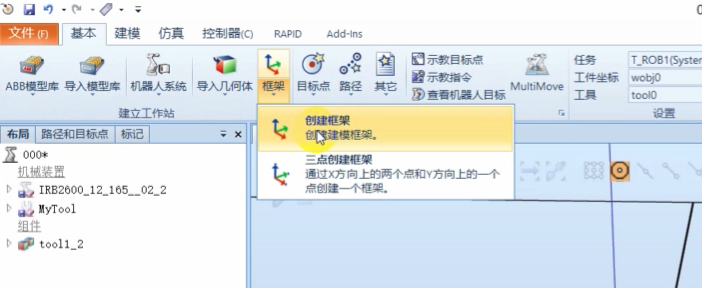
创建工具坐标系
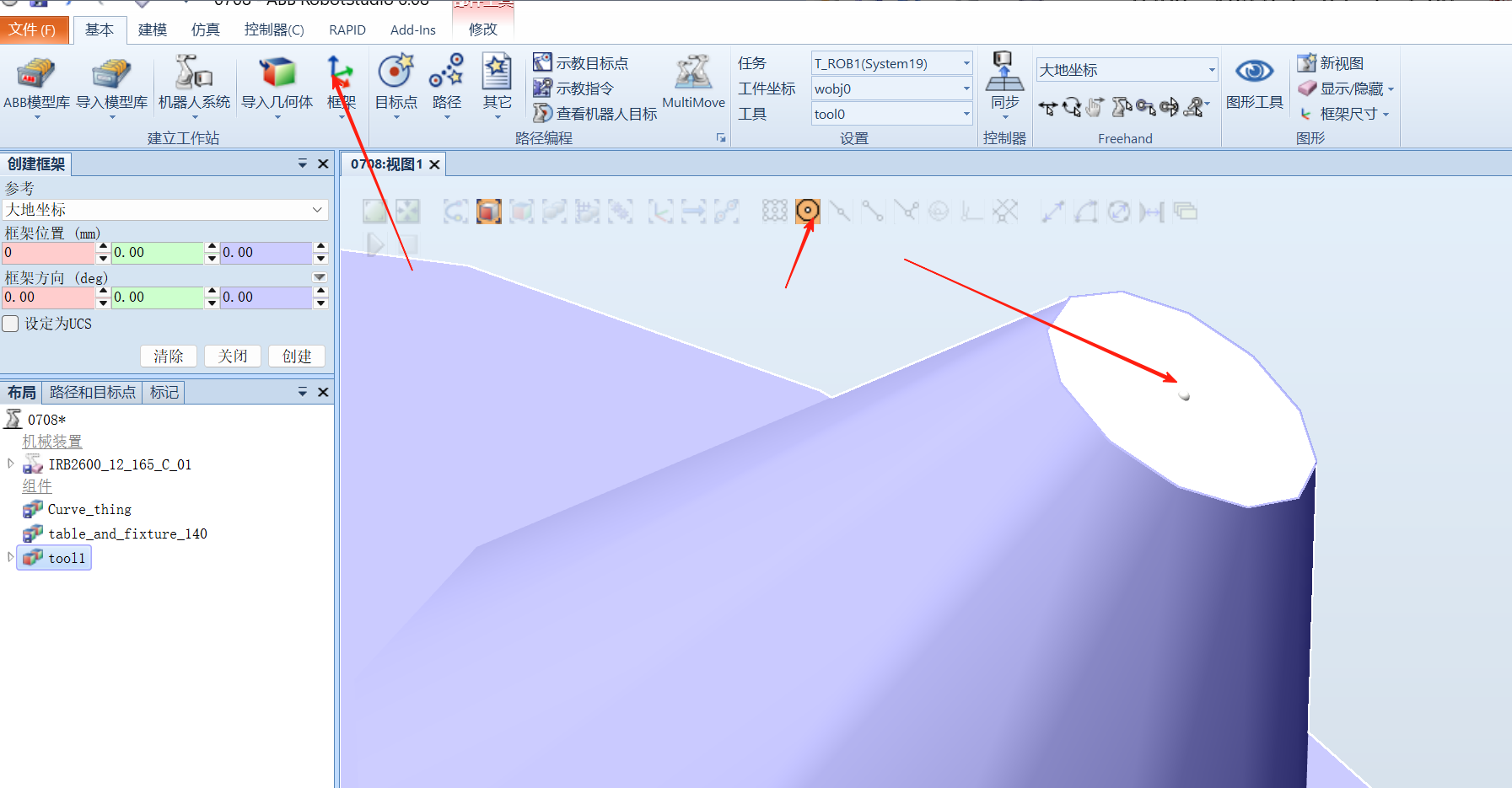
点击框架,创建框架
框架位置捕捉工具末端中心位置
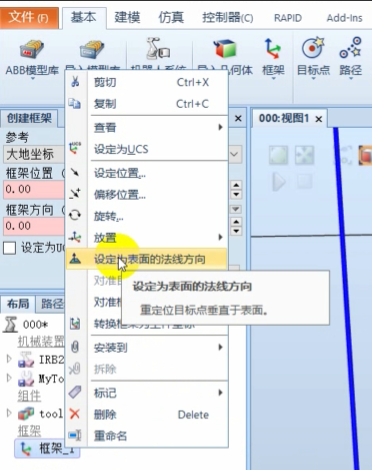
调整坐标Z轴
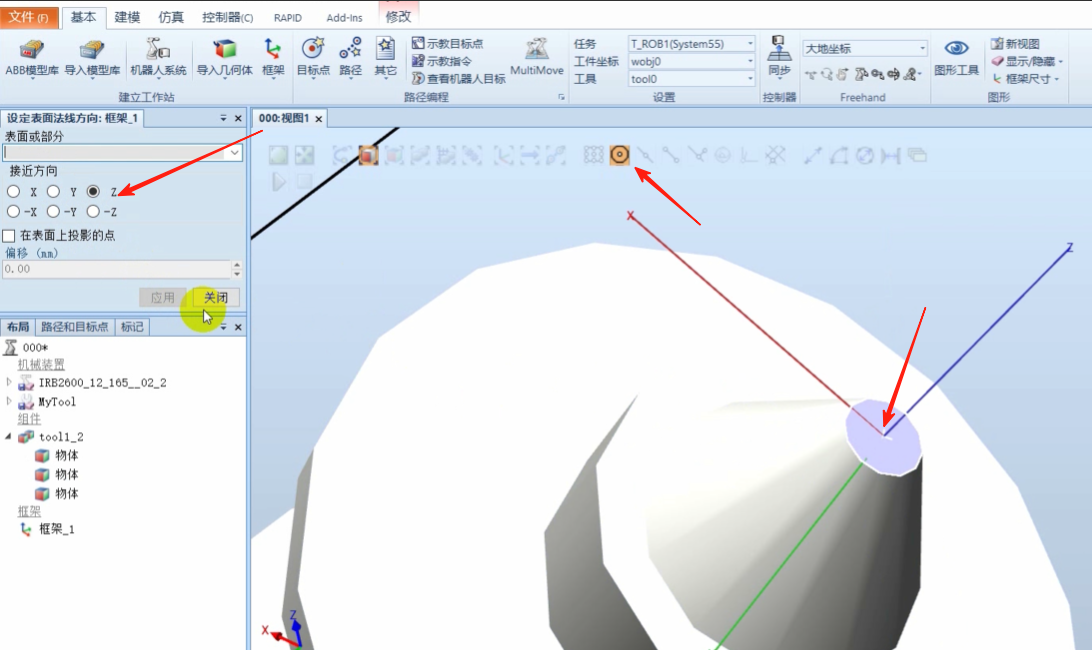
右击框架,点击设定为表面的法线方向
捕捉表面
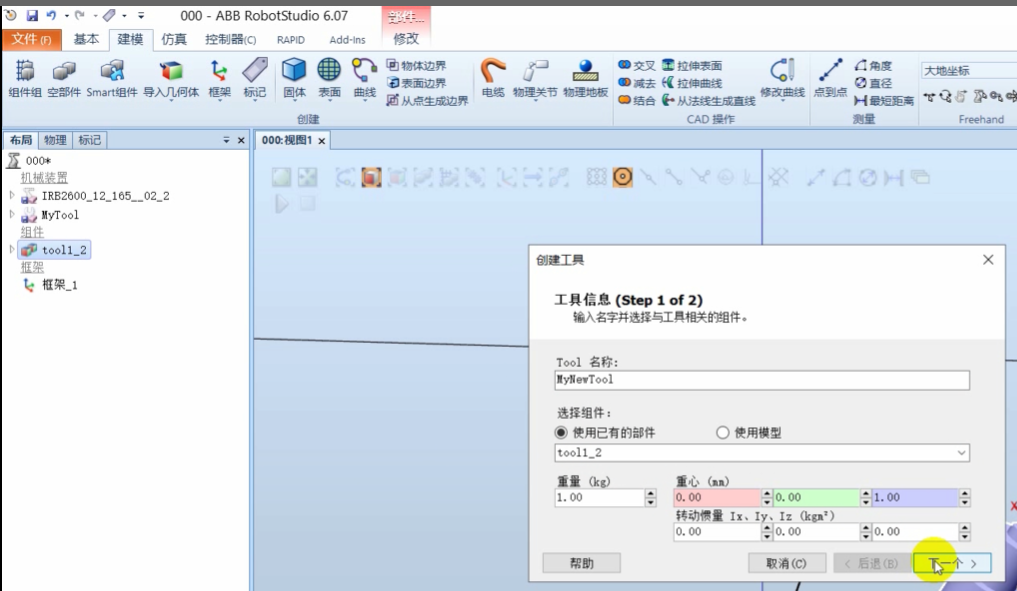
点击建模,点击创建工具
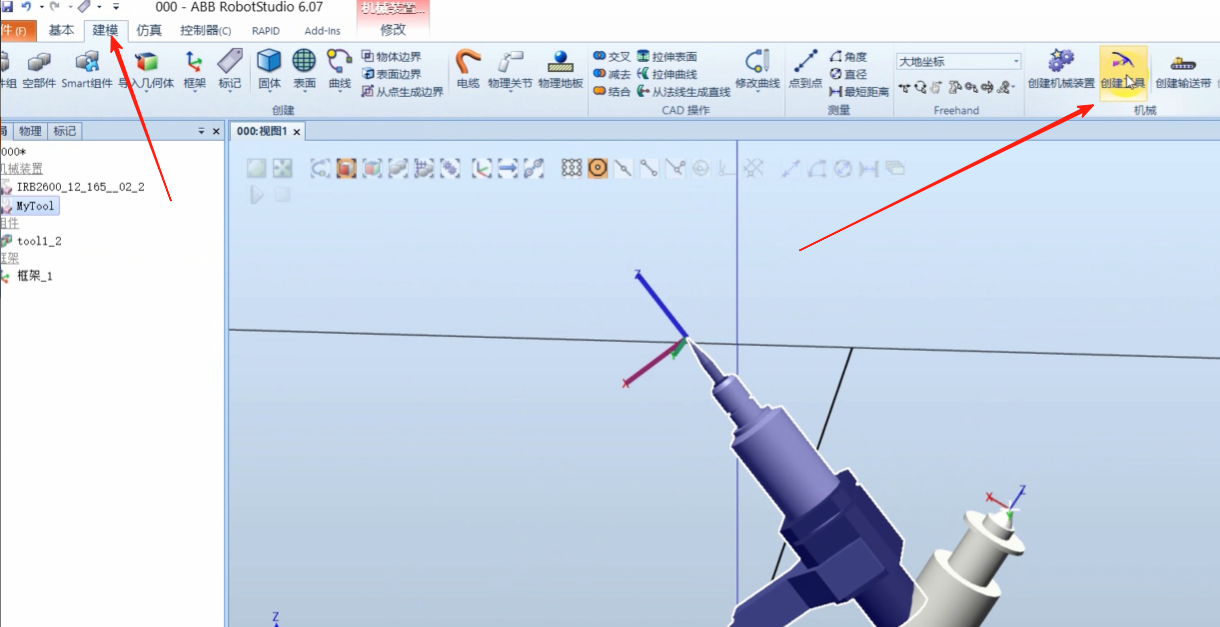
点击下一个
TCP信息 选择框架1,点击 完成
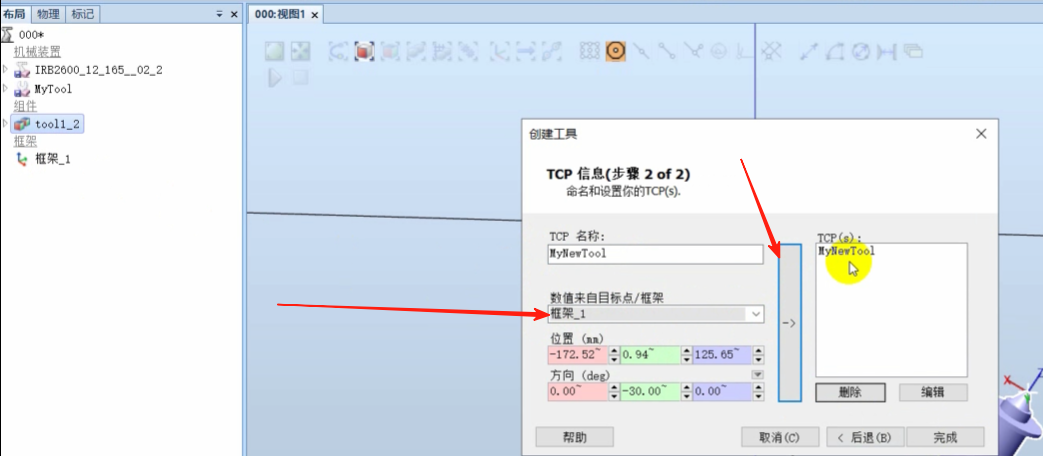
主角工具就创建好了
安装自定义工具到机器人
将创建好的工具拖到机器人名称上
选择是
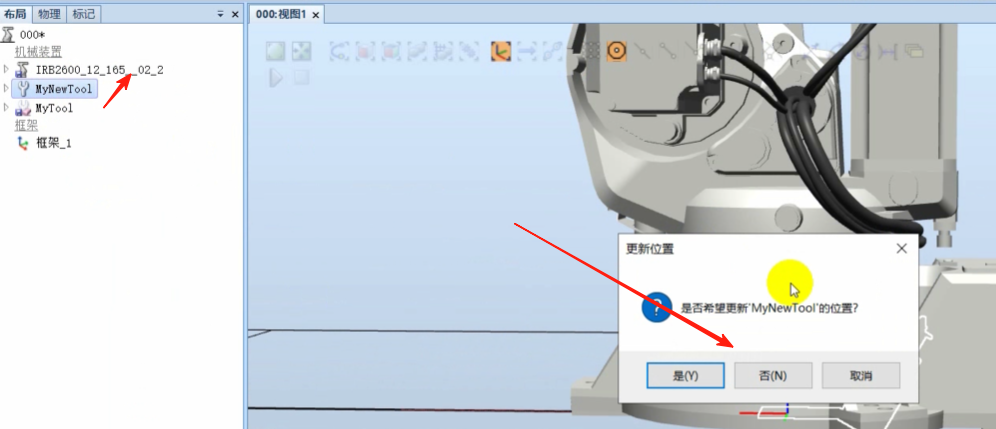
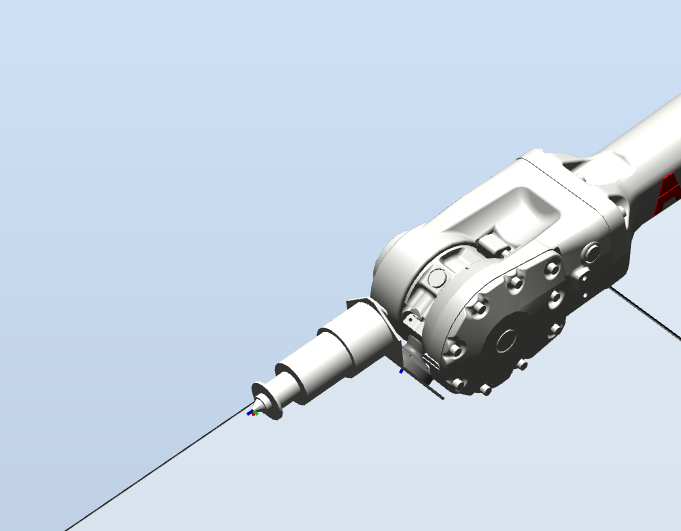
这样创建的工具就安装到机器人上面了
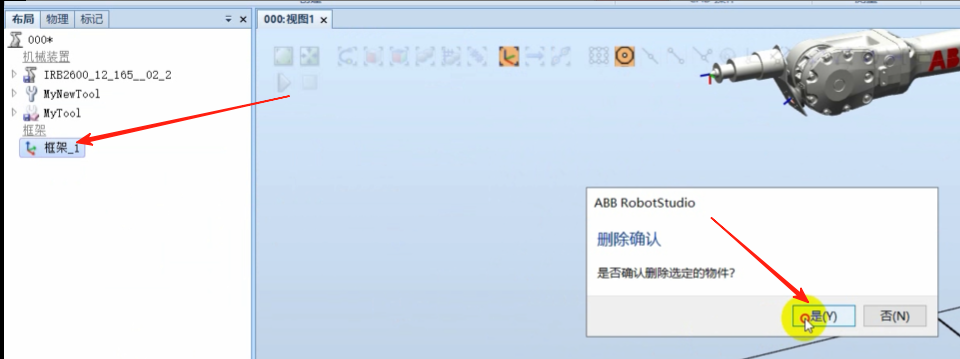
删除框架