第十一章 1.如何创建ABB机器人自动轨迹曲型路径
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
捕捉工件的曲面
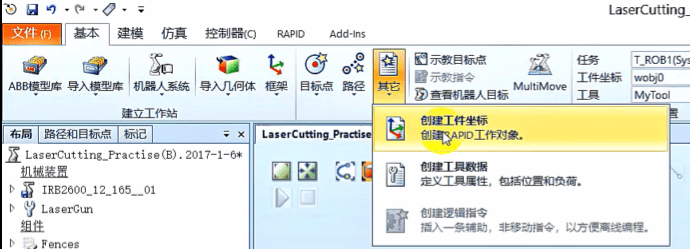
创建工件坐标
点击【其他】,【创建工件坐标】
选择3点法
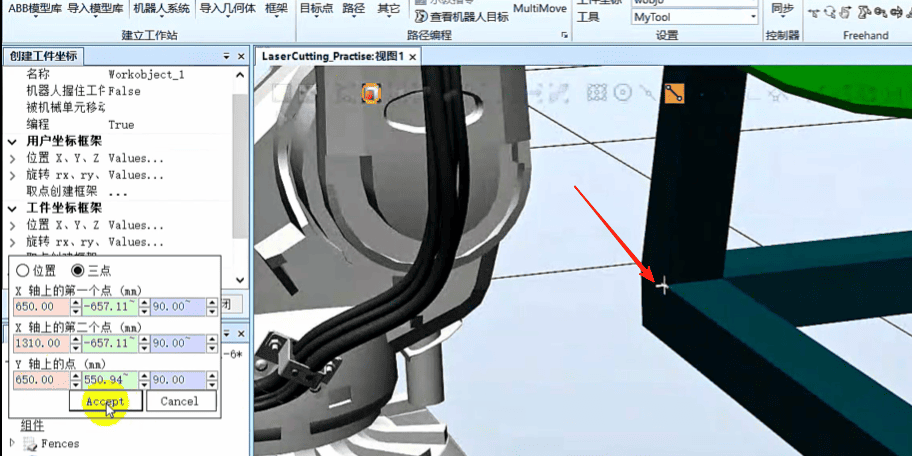
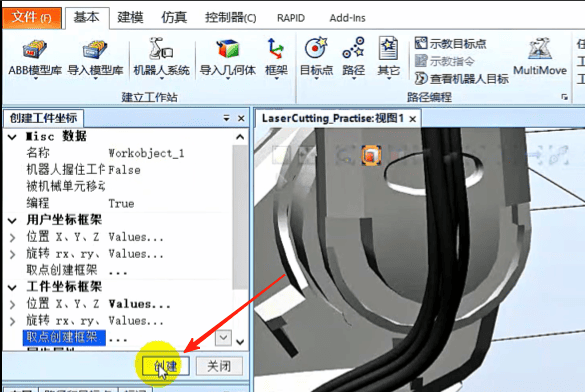
这样他就有了一个和大地坐标一样方向的坐标系
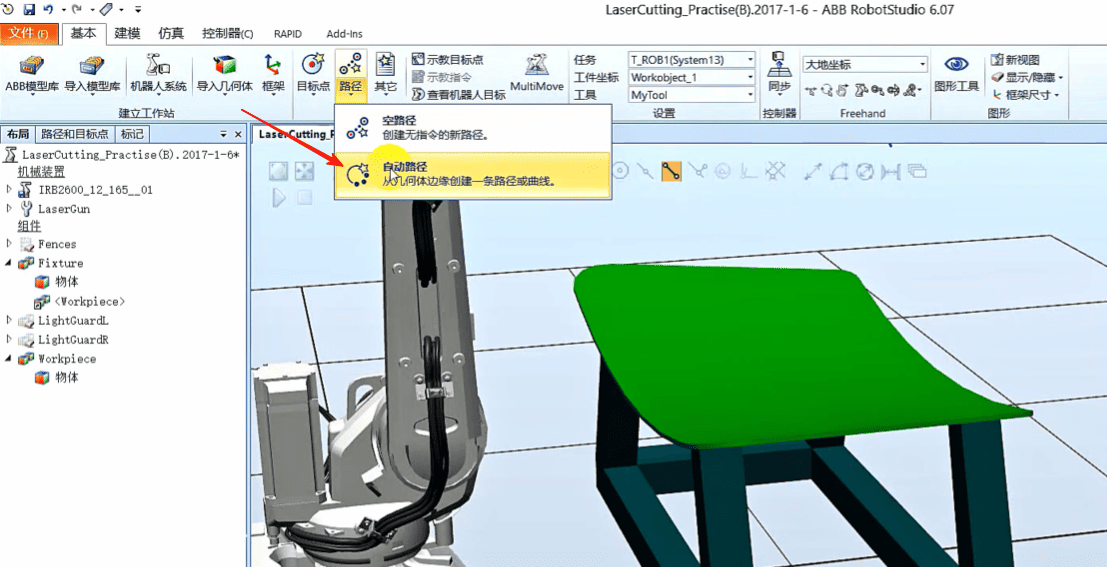
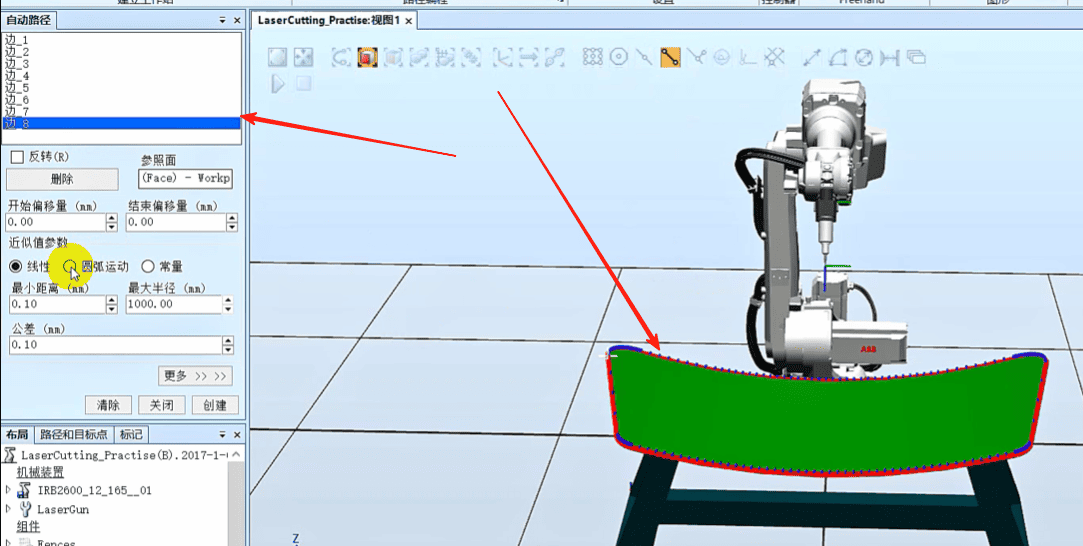
点击【路径】,【自动路径】
【参照面】选择上表面
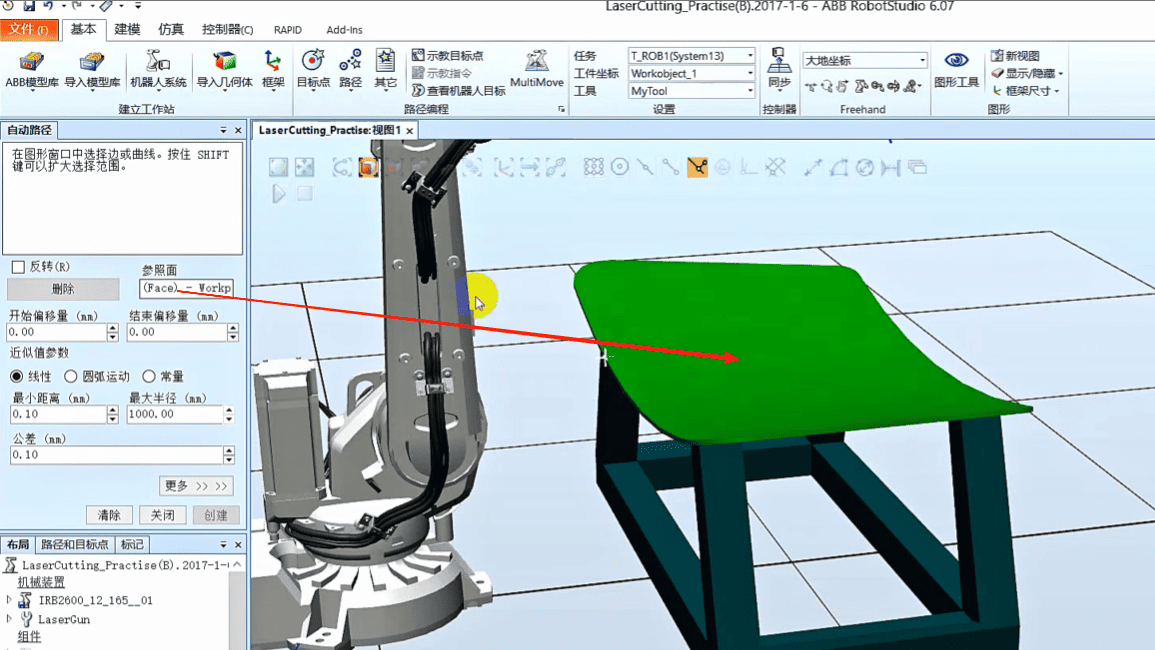
按住shift键,鼠标移动到曲面,直到边缘都变红色,点击
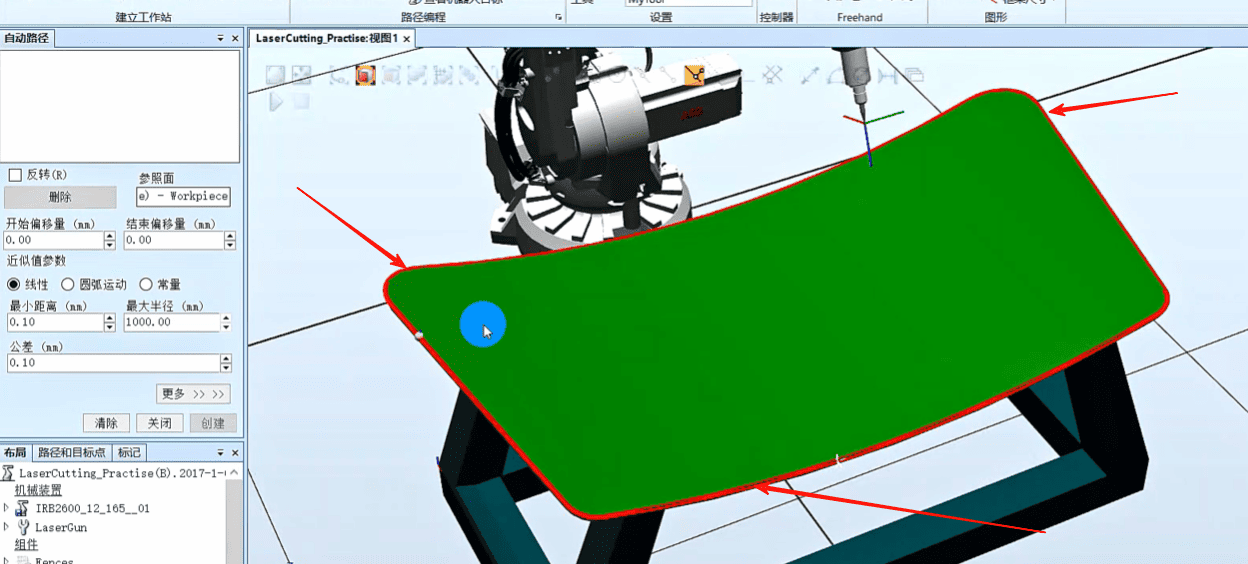
选择圆弧运动, 最大半径改成1000
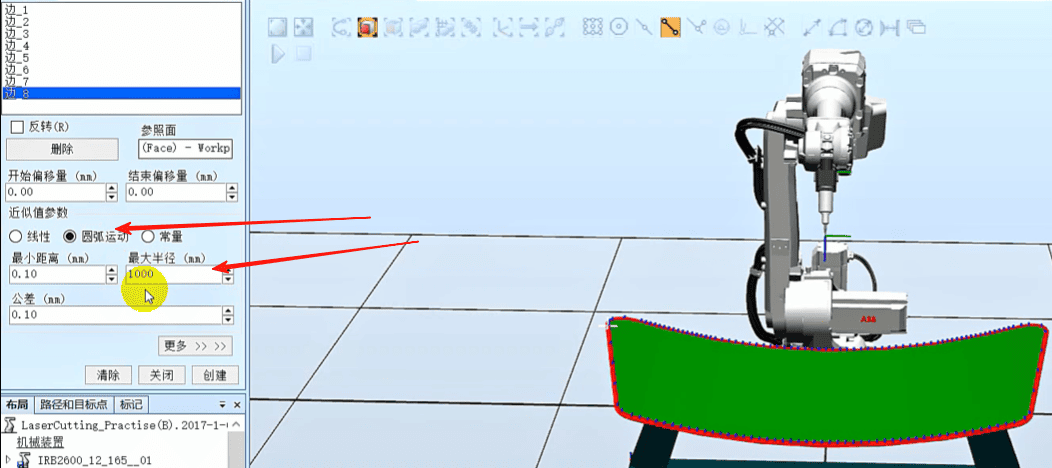
最小距离0.10,公差0.1,点击创建
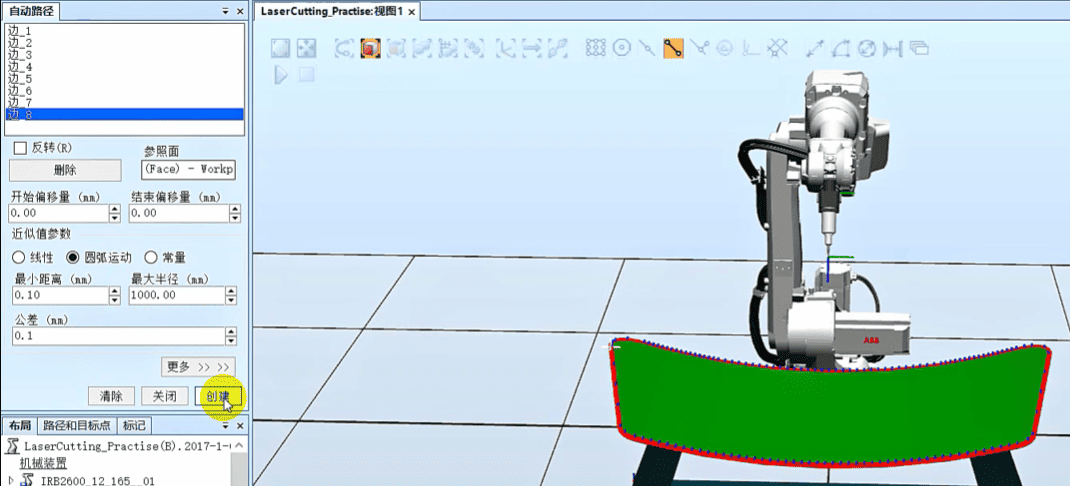
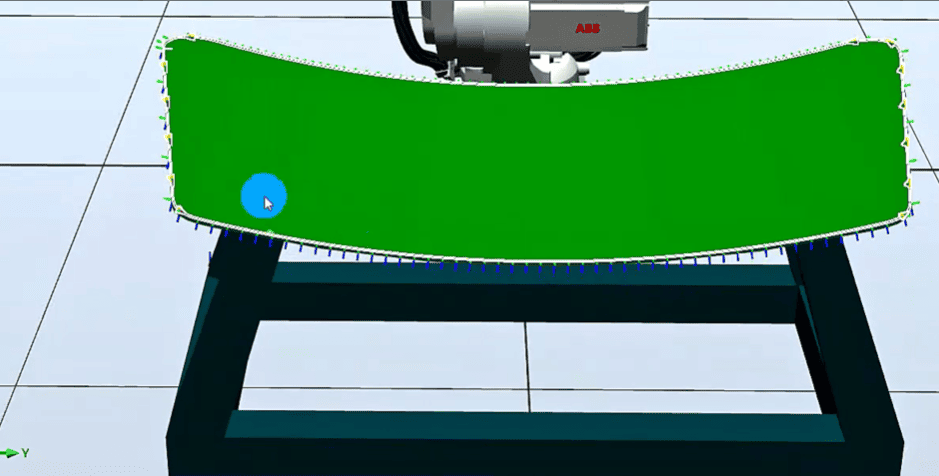
如下
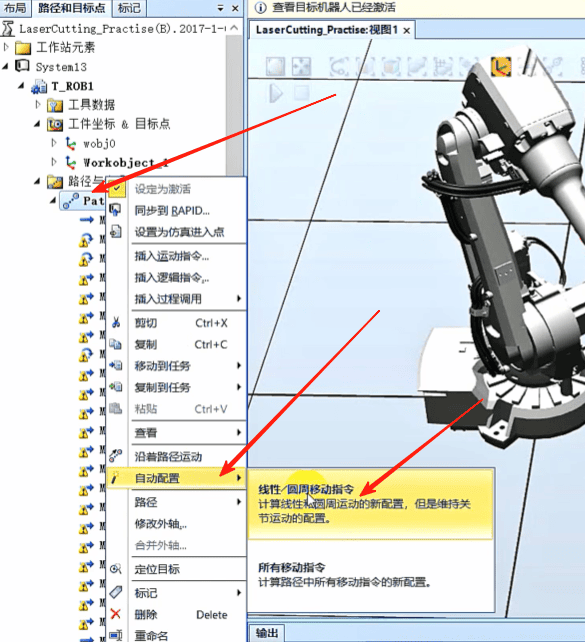
点击路径右击,选择自动配置,线性/圆周移动指令
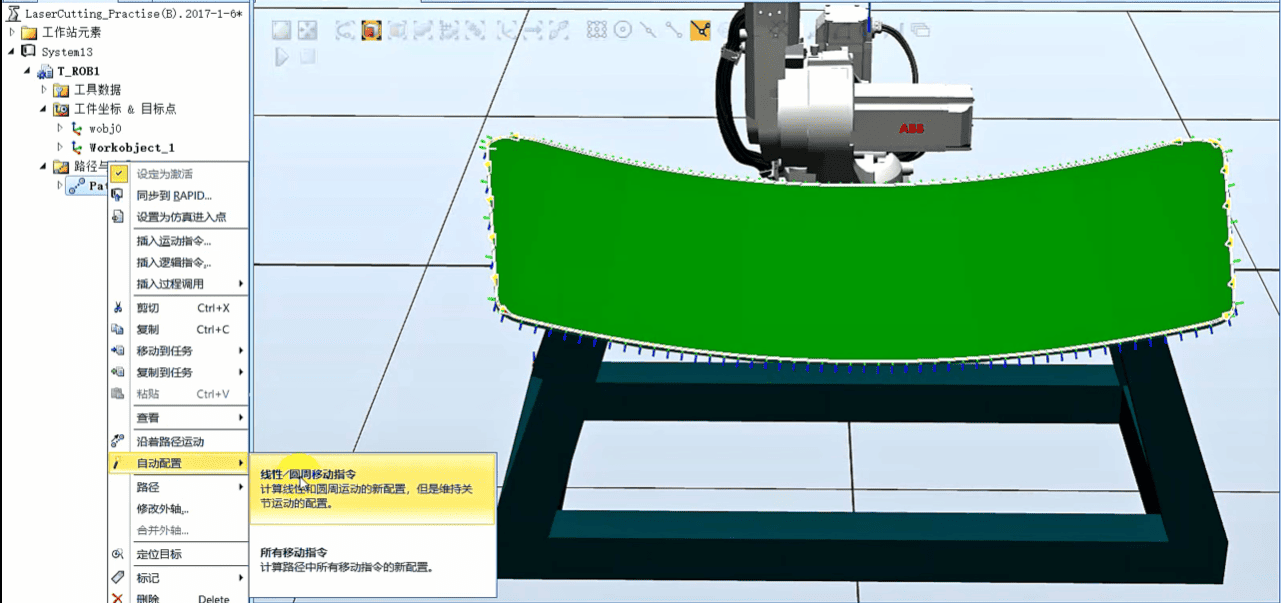
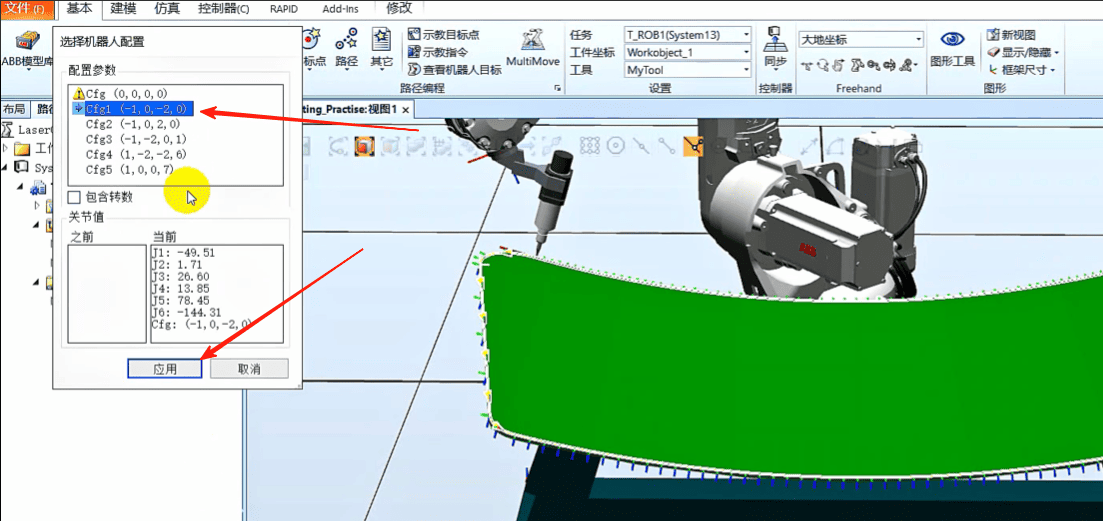
选择,点击应用
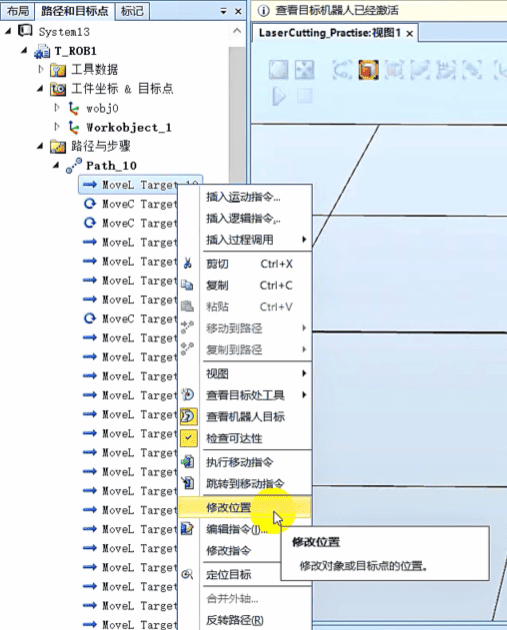
点开路径与步骤下面的路径,有感叹号的都走不到
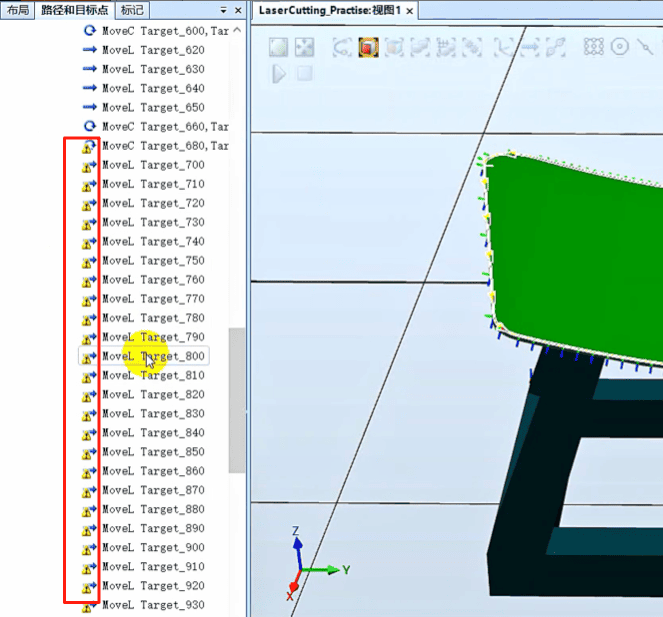
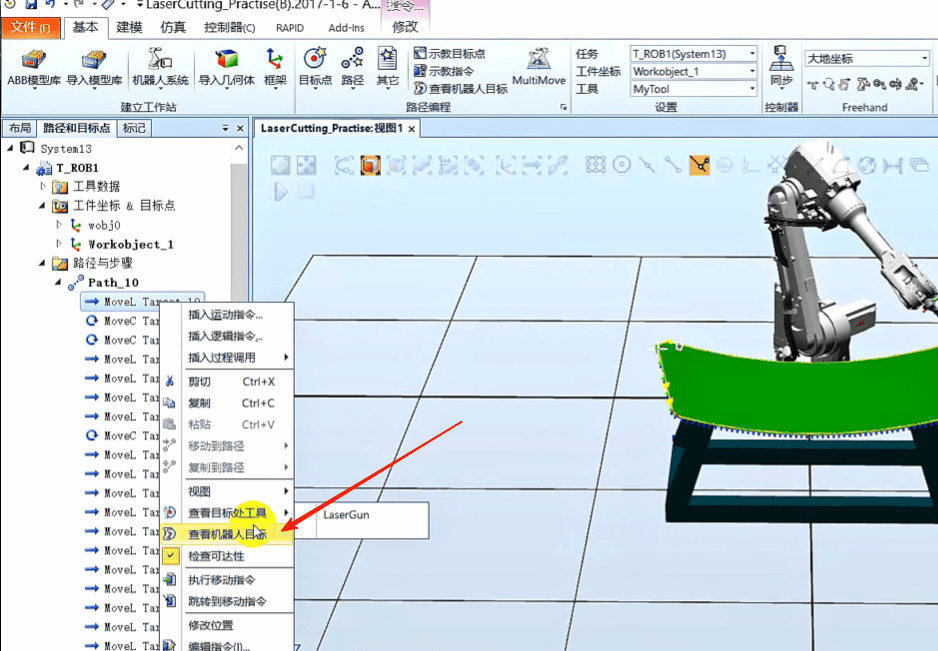
选择一个没有感叹号的点,右键查看机器人目标
选择一个没有感叹号的点,右击选择修改位置
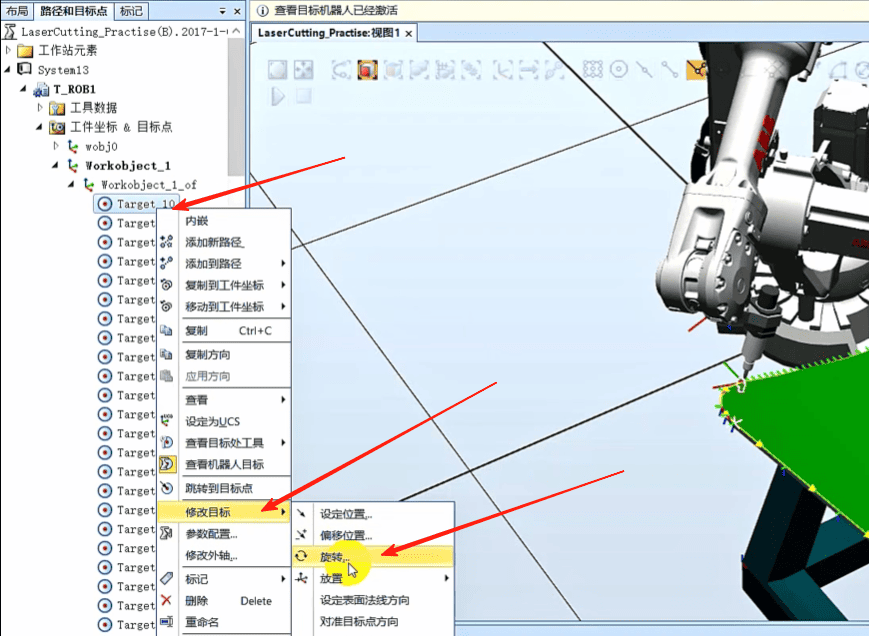
选择工件坐标下的一个点,右击修改目标,旋转
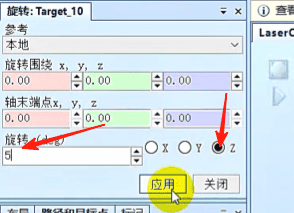
绕轴旋转5度,点击应用
以刚刚设置的点为标准,去修改其他的点
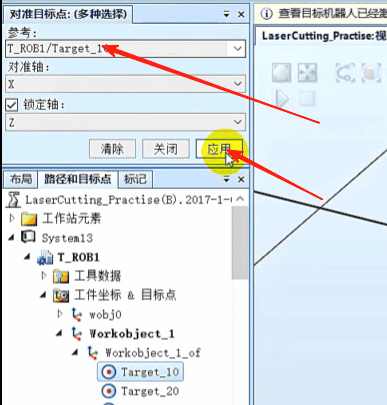
按住第二个点按住Shift到最后一个点右击修改目标,对准目标点方向

参考点选择刚刚选的那个点,点击应用
右击路径,点击自动配置,选择线性/圆周移动指令
这样路径里面的感叹号都没有了
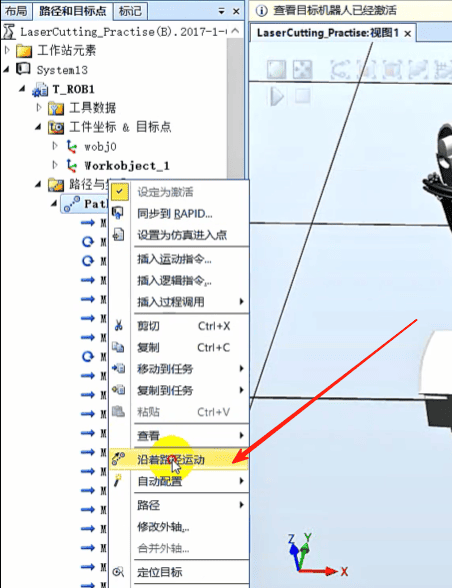
右键路径,选择沿着路径运动