第十一章 2.ABB机器人优化曲径运动
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
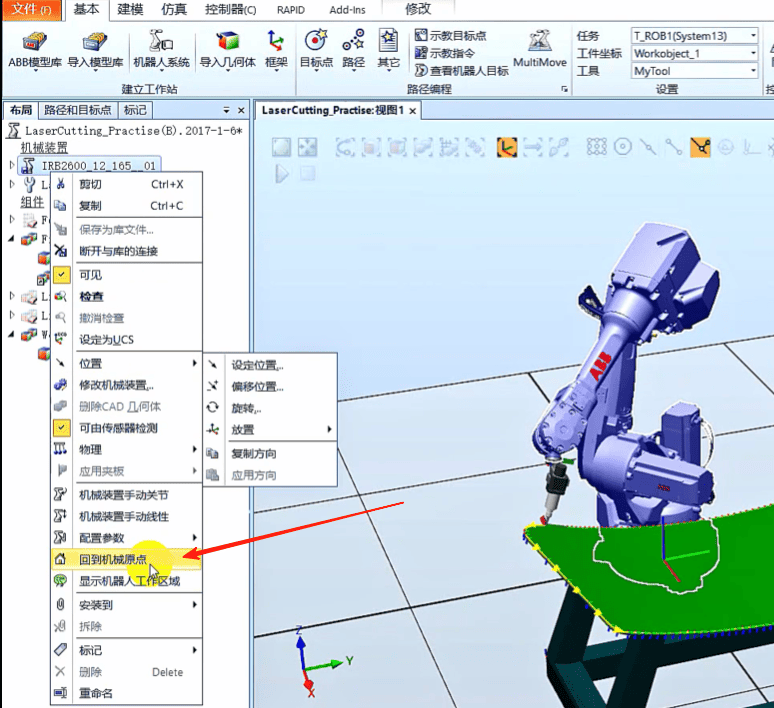
让机器人先回机械原点
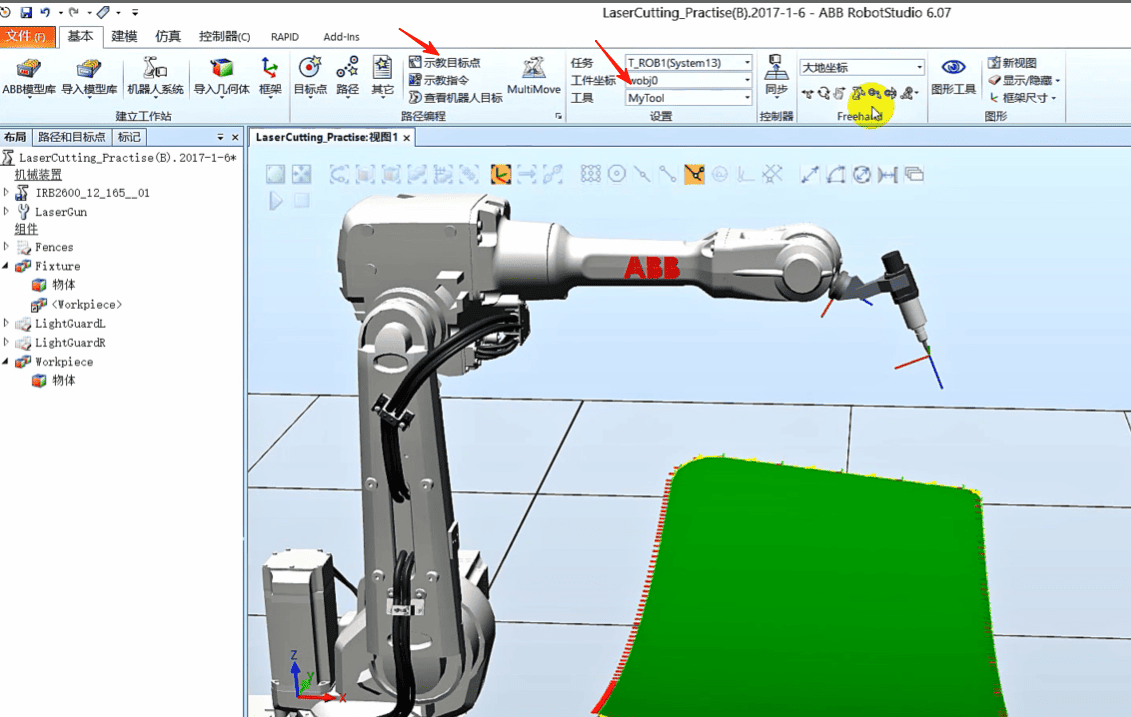
以大地坐标为基准创建一个Home点
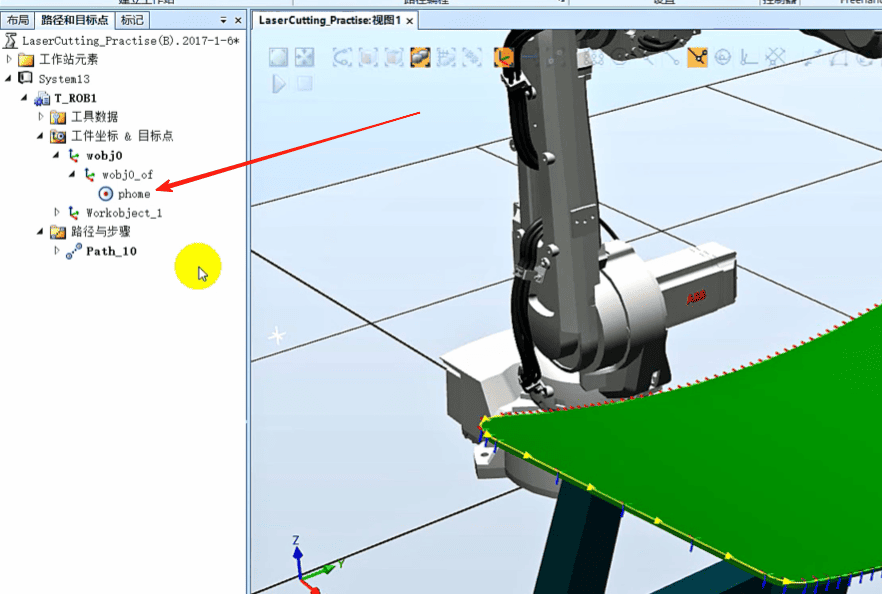
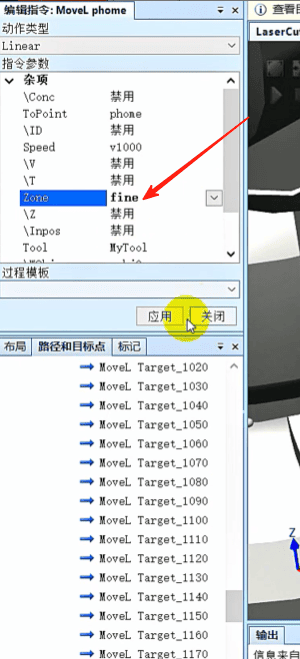
将工件目标点改成phome
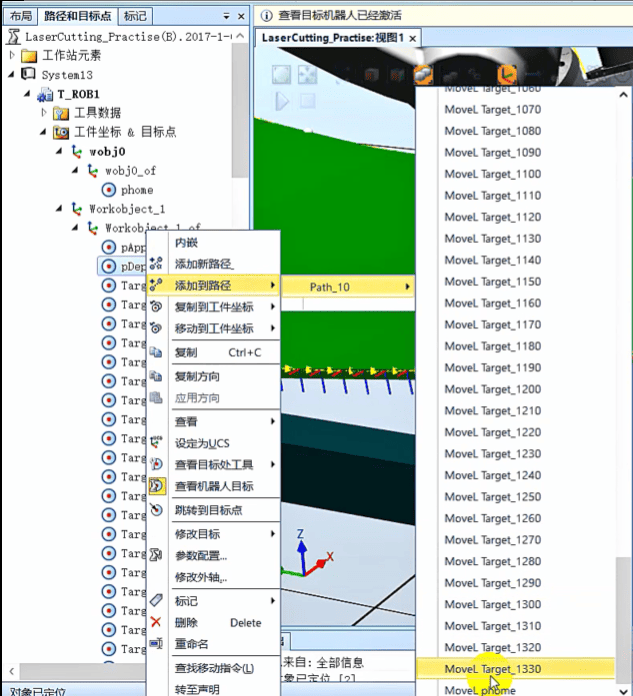
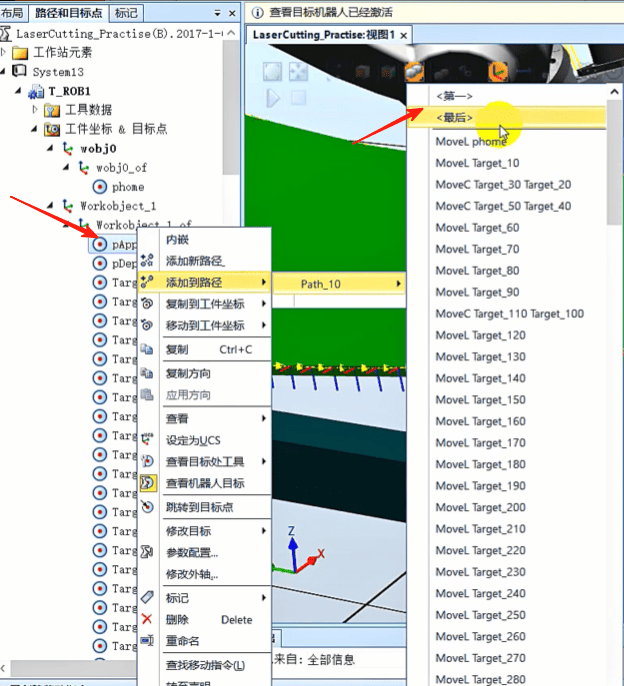
将它【添加到路径】【Path10】第一
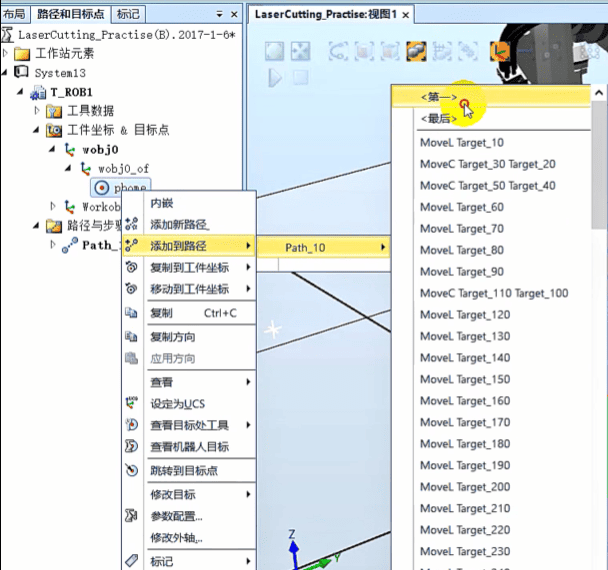
在将它【添加到路径】【Path10】最后
复制Target_10
再粘贴一下
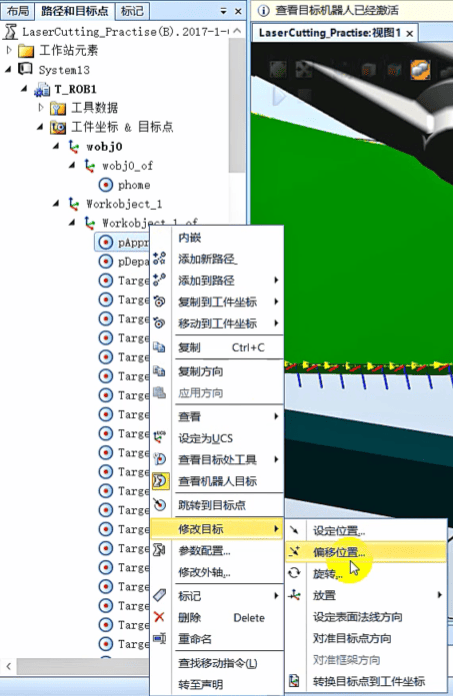
将其命名为pApproach接近点
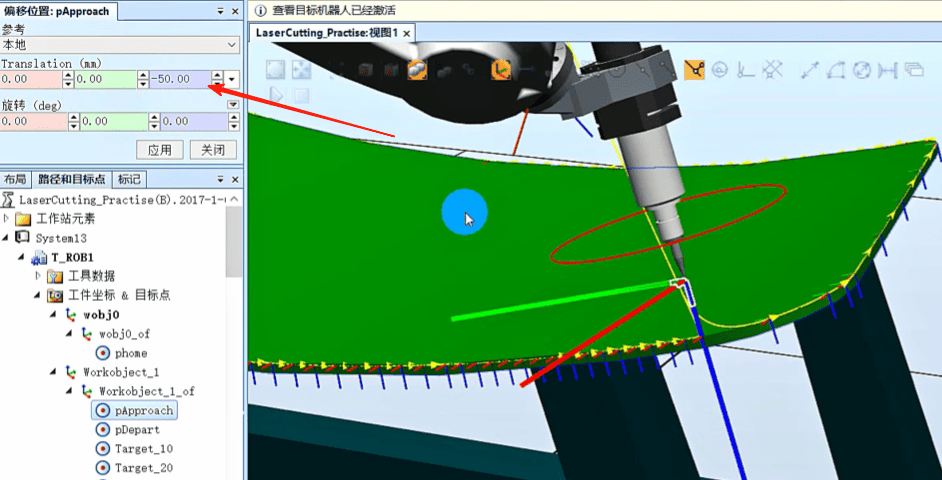
右键Approach修改目标,偏移位置
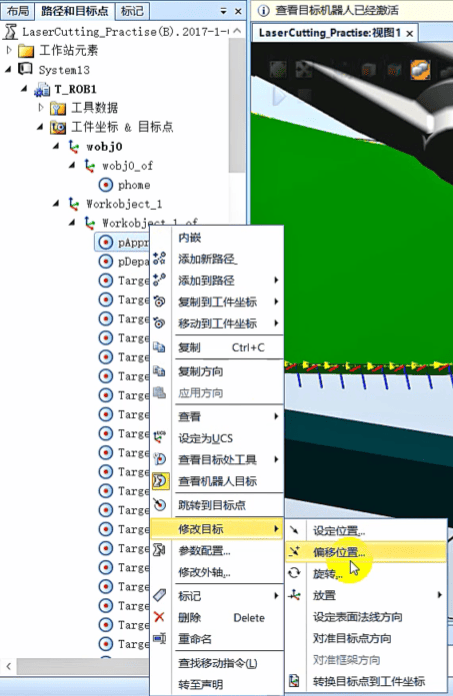
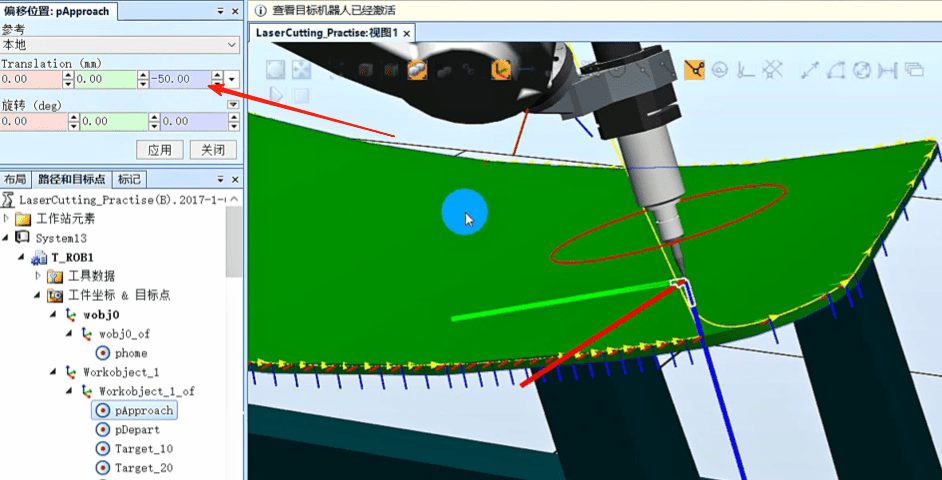
沿着Z轴方向偏移-50
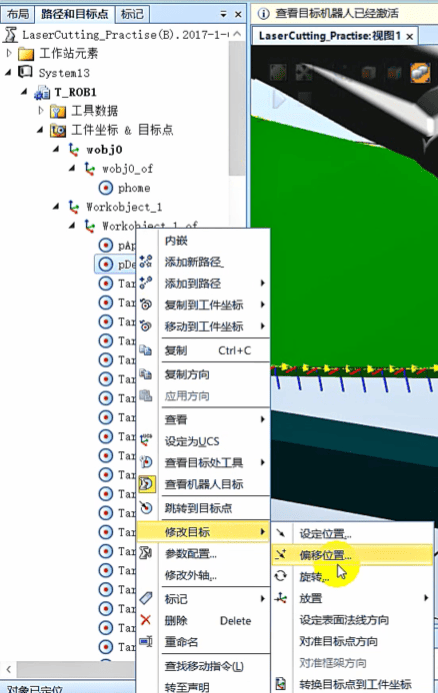
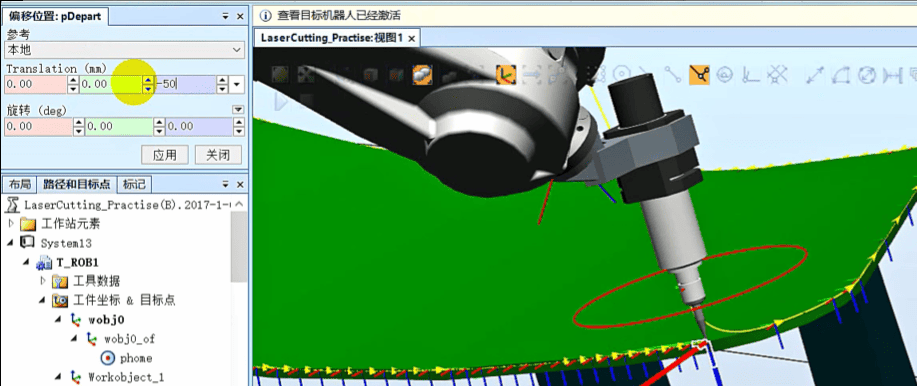
dDpart也偏移-50
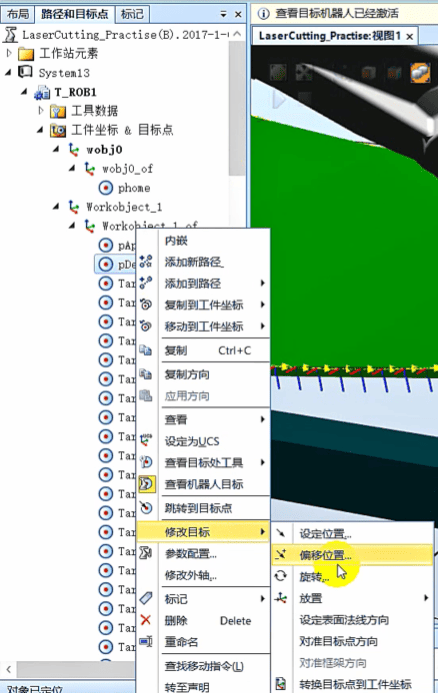
再添加到路径的倒数第二行
将其添加到路径path10的第一行
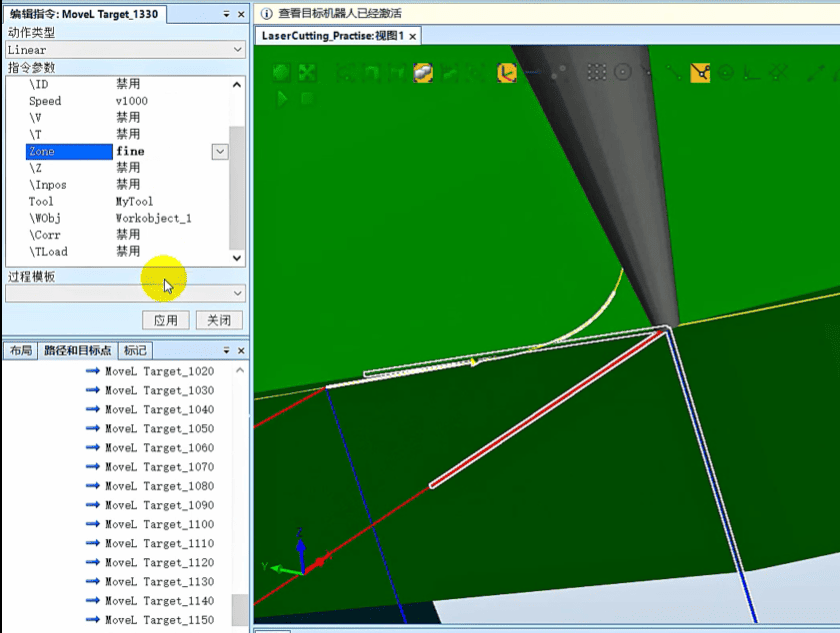
Target_10改成fine精确到达
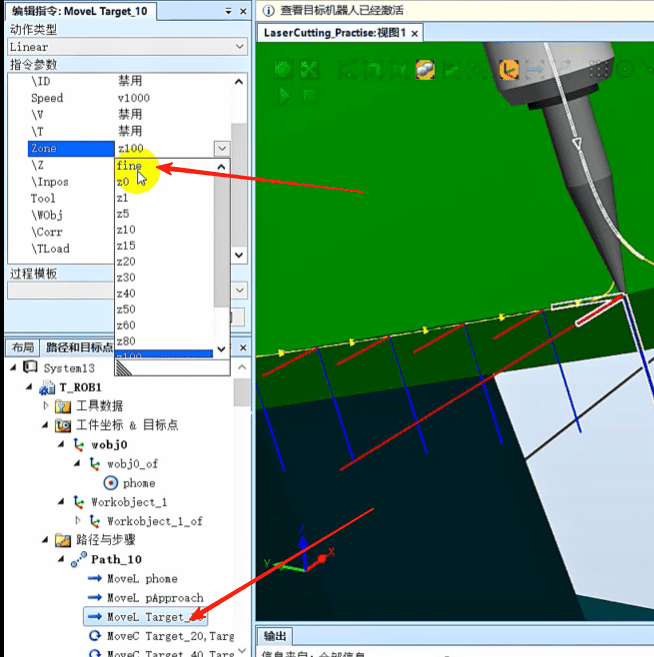
将结束点改成fine点
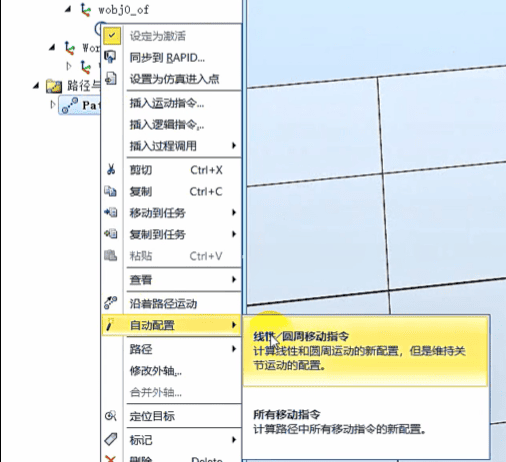
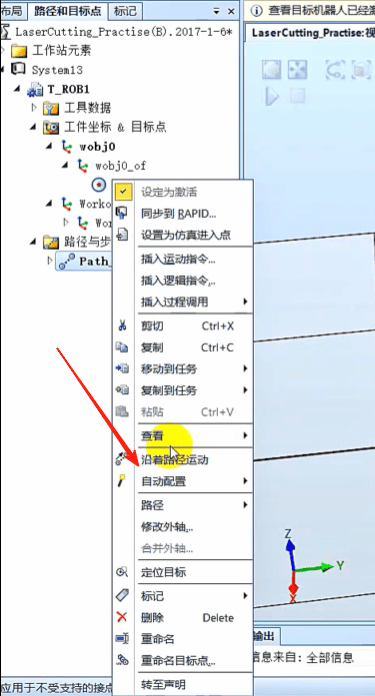
右键路径,自动配置,线性/圆周移动指令
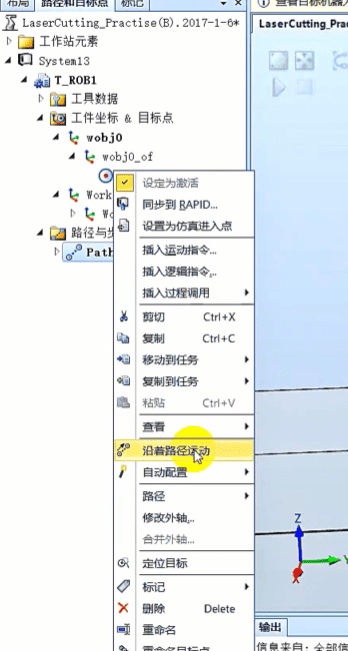
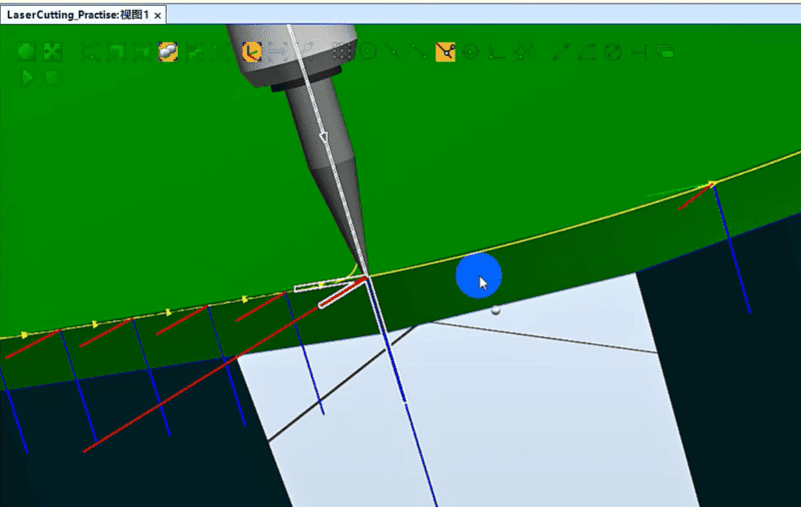
沿着路径移动
将最后一个点改成fine
右击沿着路径运动