第十一章 3.仿真和碰撞监控以及TCP跟踪功能的使用
精选原创版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
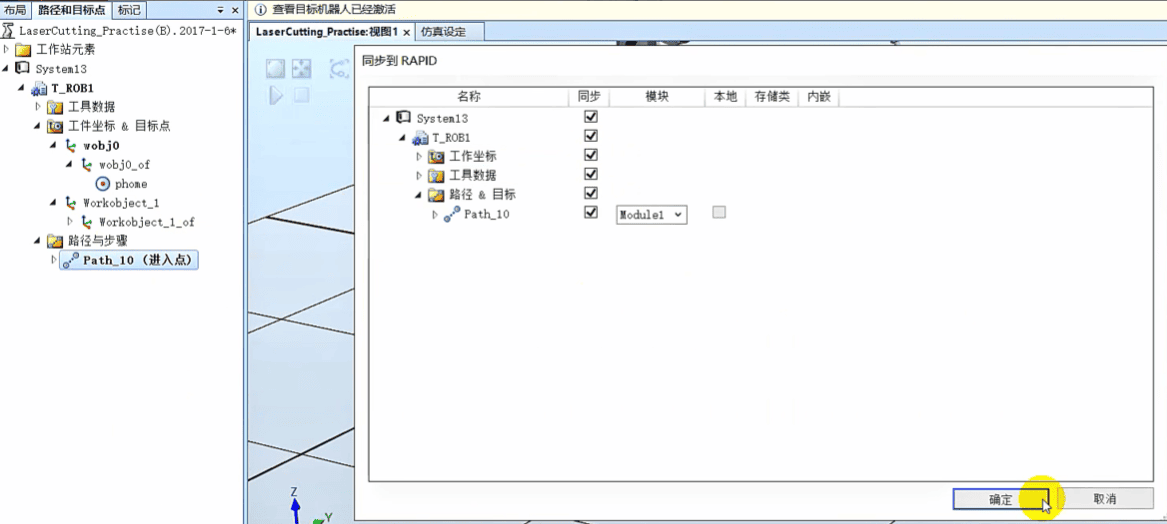
同步到RAPID
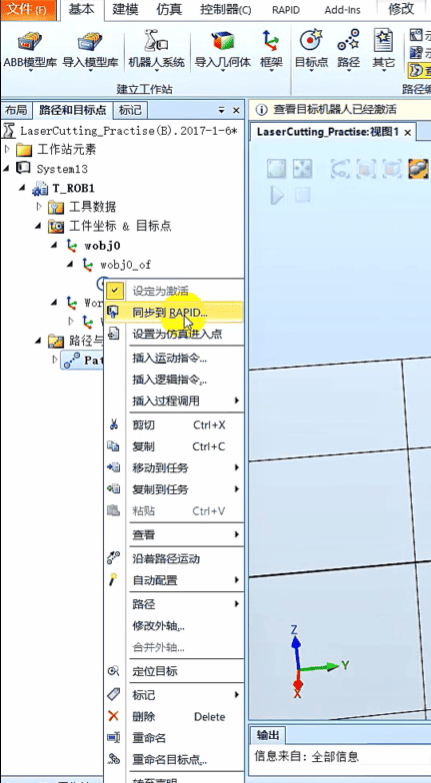
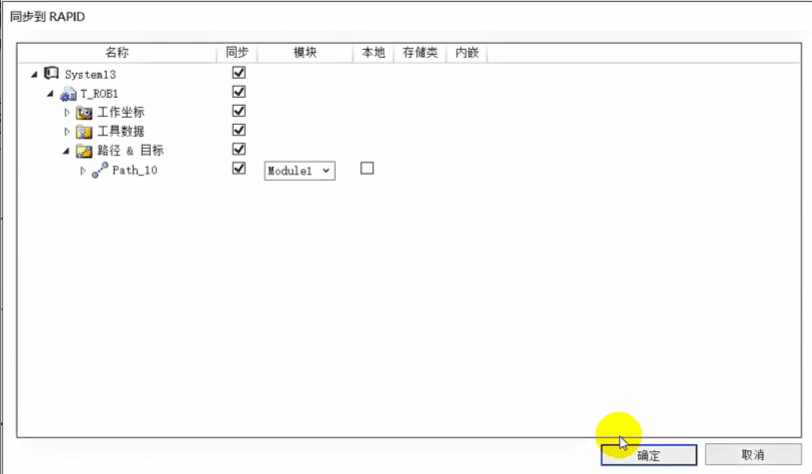
这样就同步完成了,
点击RAPID,点击Module1
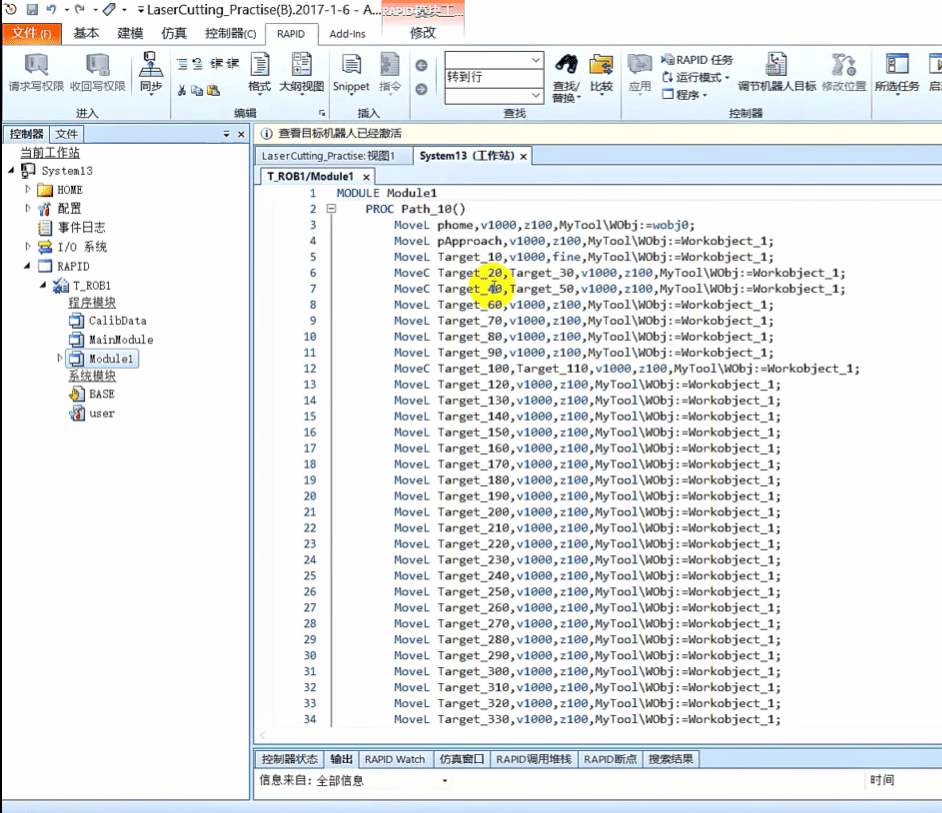
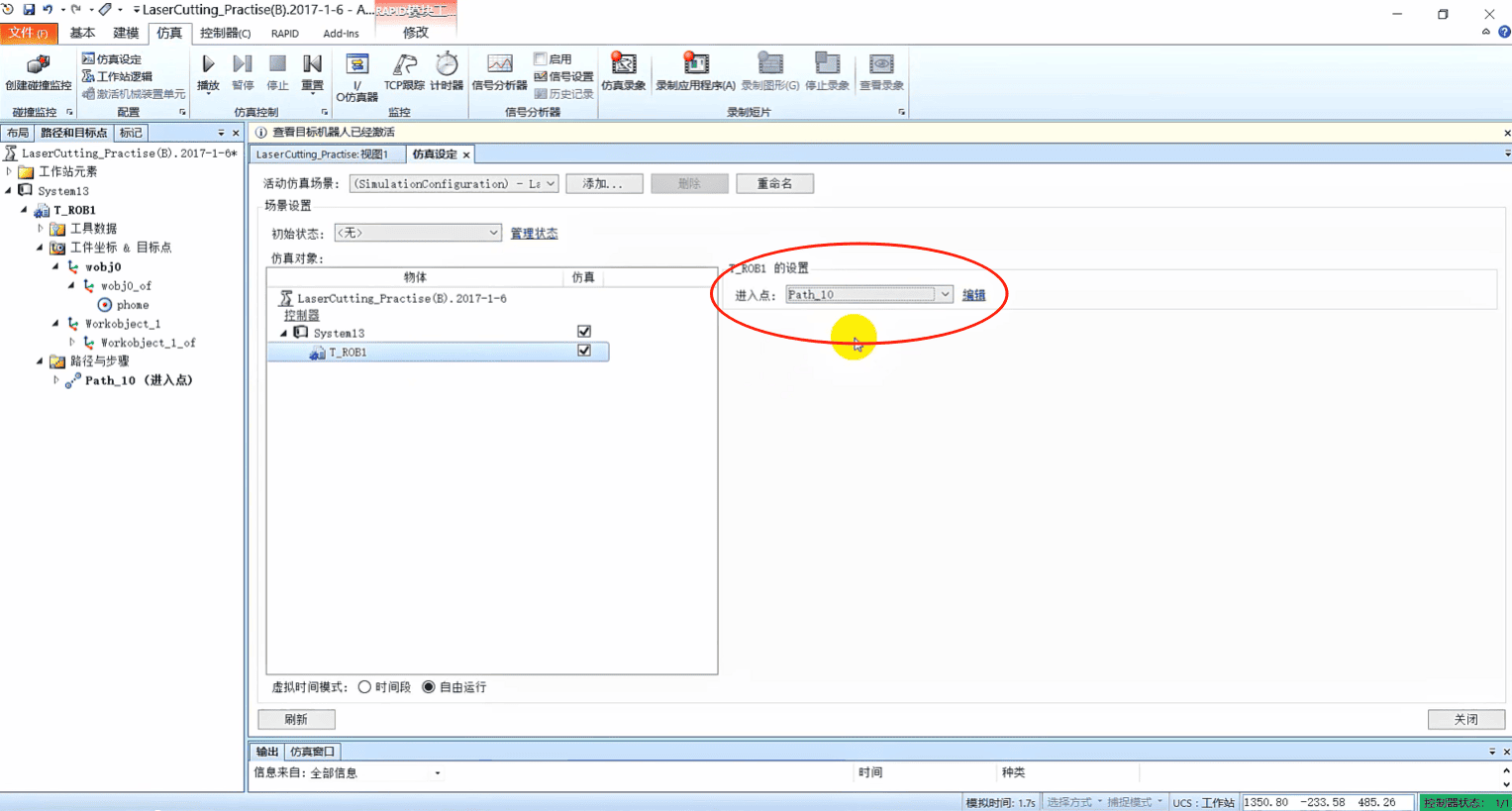
点击仿真设定, 进入点 选择Path_10
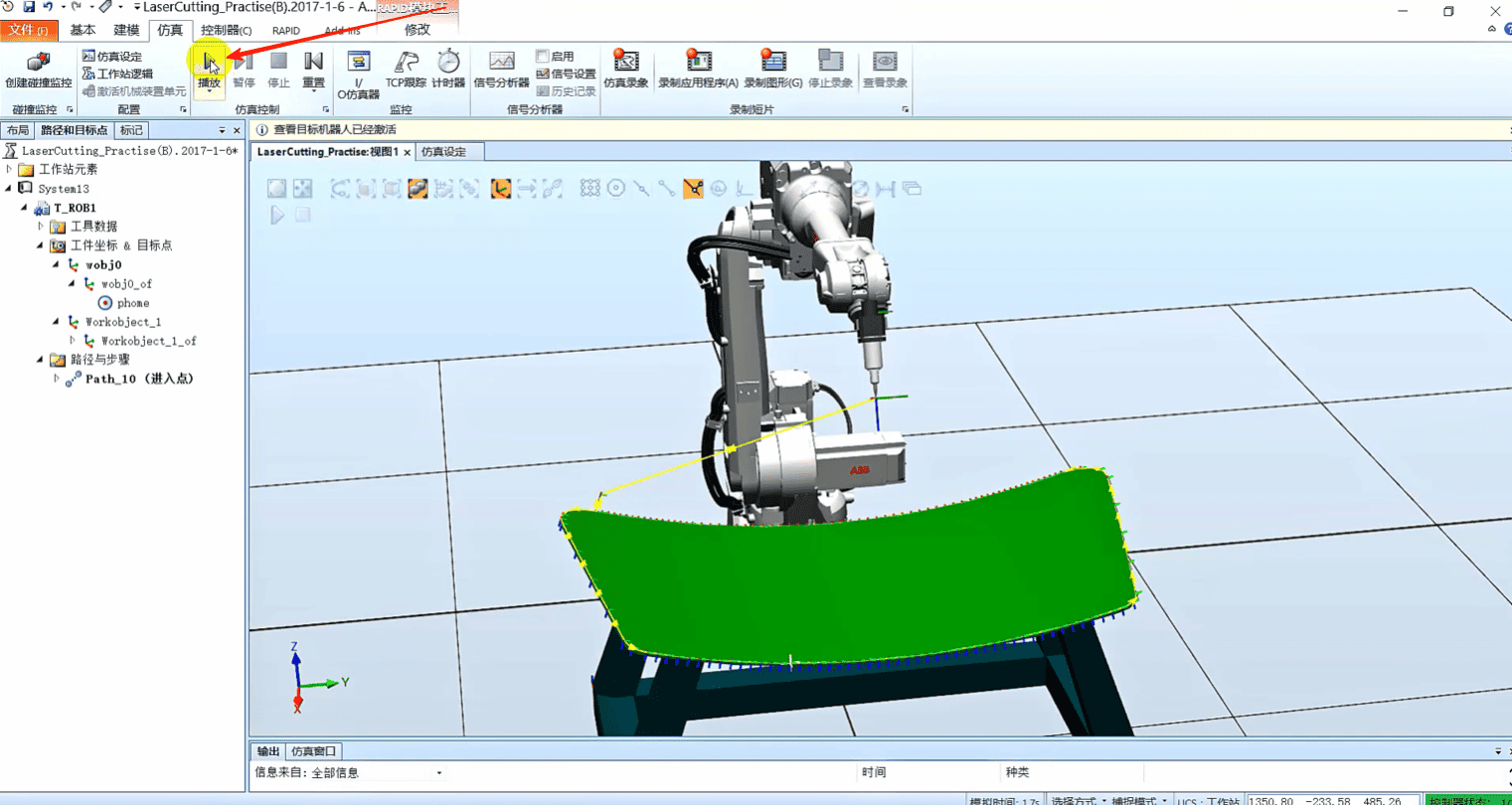
点击播放
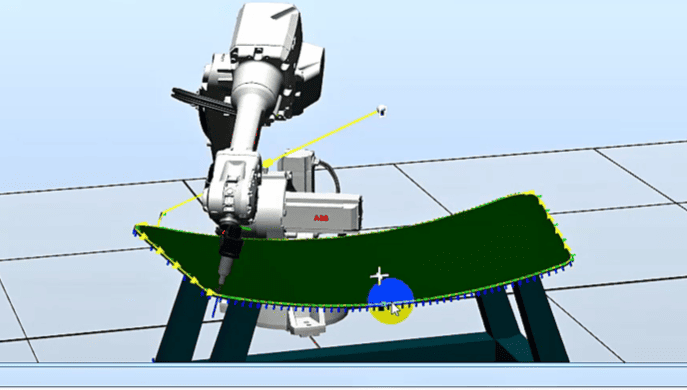
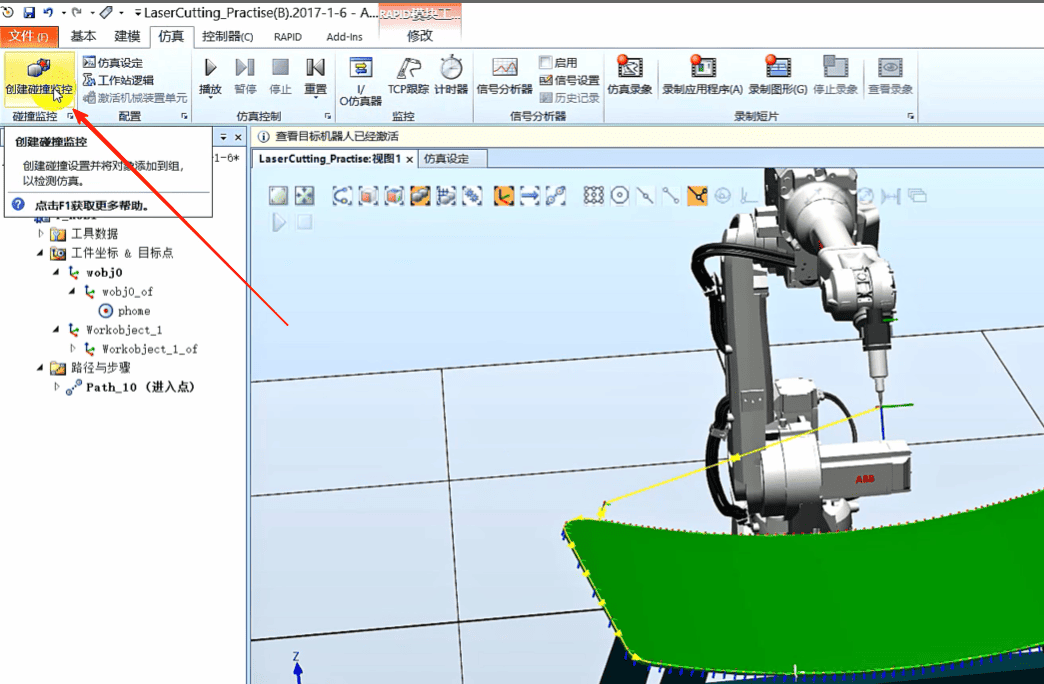
点击仿真 ,创建碰撞健康
将工具拖到A里面,将工件拖到B里面
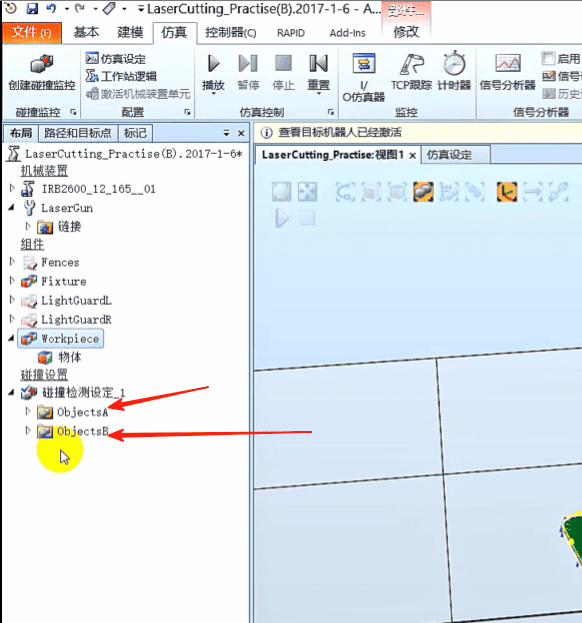
右击 碰撞检测设定,右击 修改碰撞监控
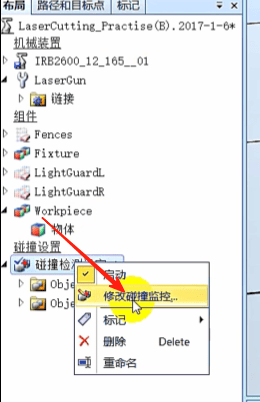
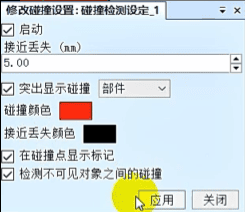
这样碰到就变红色了,低于5毫米就会黑色
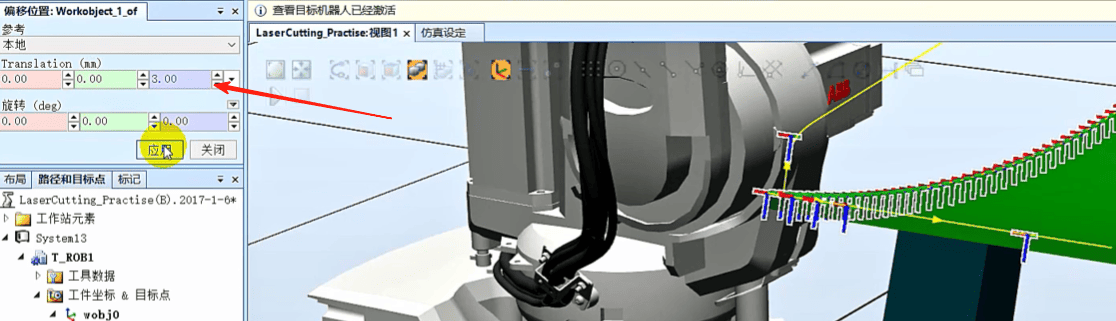
沿工件坐标向上提高3毫米
再同步到RAPID
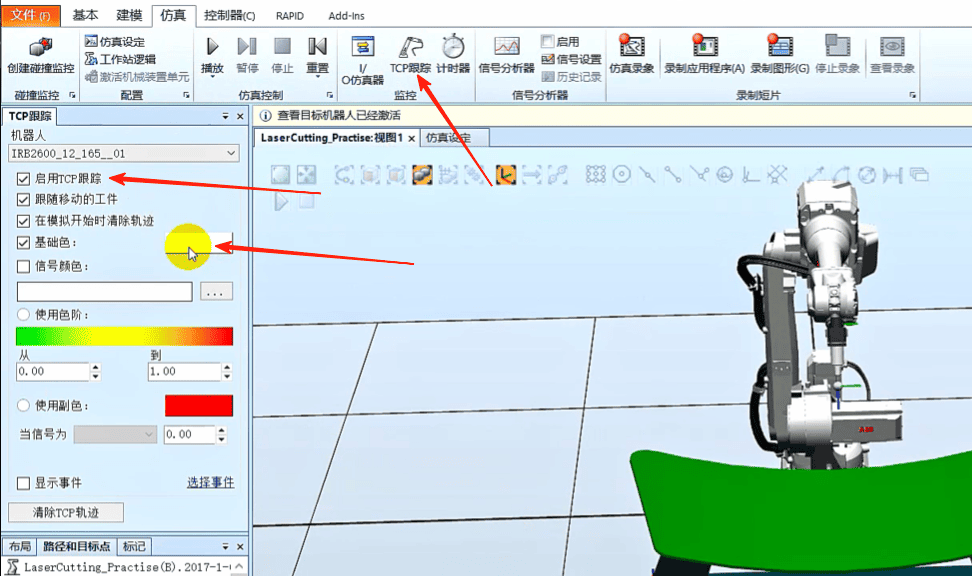
TCP跟踪
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
这样就同步完成了,